ロボティクスで切り開く産業DXの未来
ーロボットシステムの推進を産学連携で進める新しいかたちー
㈱現代経営技術研究所 シニアコンサルタント
東北大学大学院工学研究科 特任教授
泉 秀明
はじめに
今日話をさせていただく内容は、サブタイトルで分かると思いますが、広範囲に渡るので、皆さんが展開を容易に理解できるように、事前にテーマと概要を話しておきたいと思います。
まず最初に“ロボット開発の現状と課題”と題して、私が3年間従事した京都大学インキュベーションプログラムにおいて扱ったレスキューロボットを紹介します。その後で今後普及すると予想されているサービスロボットの具体的なイメージを理解していただき、産業用ロボット及びサービスロボットに関して、ロボット開発の現状と課題を説明したいと思います。
次に、“デジタルツインで日本の産業が世界をリードする”と題して、DXの中心的な技術となりつつあるデジタルツインを説明します。そして、プラントの無人メンテナンス化を目指して進められるプラントのデジタルツイン、そのフィールドに連携して機能する中核技術としての自動巡回監視ロボットを説明します。
3番目に、“ロボティクス開発の背景にあるイノベーションと理論”と題して、デジタルツインに代表されるようなデジタル技術発展の背景に、ビジネスを推進させているどのような理由が存在しているのかに関して、取引コスト理論を用いて理論的説明を行います。
最後に、“産学連携による新たなプロジェクトの推進”に関して説明をさせて頂きます。私は産学連携の橋渡し役を務めたいと考えており、私が従事してきたようなプロジェクトが、日本の競争力を高めるためにどのように進められていくべきなのかに関して、言及したいと思います。
冒頭ですが、このセミナーを通じて、今後実施される様々な産学連携プロジェクトに関してご理解を頂き、皆様からのご協力・ご支援を賜ることを期待しています。
1.ロボット開発の現状と課題
1.1 レスキューロボットの最前線
1.1.1 レスキューロボット紹介
私は、2019年4月1日から2022年3月31日までの3年間、京都大学において産学連携プロジェクトの事業開発責任者を務めました。プロジェクトは、“京都大学インキュベーションプログラム” という正式名称で、京都大学にあるシーズを更なる研究・事業開発を行うことによって、3年以内にベンチャーキャピタルからの資金調達を以て起業することを目的としたものです。具体的内容は、“レスキューロボットのデュアルユース化”、“災害非常時に使うレスキューロボットを、通常時において将来的に実現されるプラントの無人メンテナンス用自動巡回監視ロボットとして使用する”目的の研究・事業開発プロジェクトです。
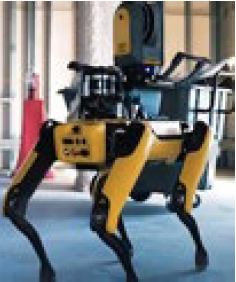
まずは、デモビデオを2本見ていただきます。一本目は2020年4月8日にドイツの公共放送で放映された“京都大学松野研究室のロボット研究開発への取り組み紹介”(写真1.1)1であり、2本目は、2019年12月13日に、京都大学・千代田化工建設共同研究開発下で実施された、千代田化工建設実験プラントでの松野研レスキューロボットの走行・機能試験を行った際の録画(写真1.2)2です。


デモビデオ1 では、松野研における様々な研究開発活動が紹介されています。“存在を感じさせない程ロボット技術が社会に溶け込み、ロボット操作を意識せずにロボット作業ができるような「消えるロボット」システムを実現する”という松野先生の研究に対する強い考え方が紹介されています。この考え方を基本にプロジェクトでは、平時に使用するロボットシステムが緊急時にも使えるというデュアルユースのコンセプトを実現し、安全で安心に暮らせる社会の構築を目指すため、ロボット導入が比較的遅れている建設業の施工・保守管理、解体作業をロボットシステム社会実装のターゲットとしました。その方向性が、プラントの無人メンテナンス化を推し進め、プラントデジタルツインと自動巡回監視ロボットの技術を統合しようとしていた千代田化工建設との共同研究開発へと結びつきました。
デモビデオ2 では、レスキューロボットが遠隔操作ながら、プラントにおける走行性やバルブ操作が可能であること、将来的に千代田化工建設が実現しようと考えている“プラントの無人メンテナンス対応”に適合していることを紹介しています。
1.1.2 研究・事業開発上の課題
レスキューロボットのデュアルユース化としての研究開発は、①非常時に使用するレスキューロボットを平常時にも自動巡回監視ロボットとして使用できるように、関連する機能を開発すること、②ロボットをモジュール化し、状況に応じてサブシステムを柔軟に組み換え可能にする設計・制御技術、ユーザーインターフェイスを開発する、ということでした。事業開発は、レスキューロボットをデュアルユースとして使用するニーズを持つ企業である事業パートナーと応用技術開発を担う技術・サプライパートナーを発掘して、市場開発を行うことでした。
研究・事業開発を始めてから様々な環境変化に遭遇してきました。マクロ環境では、事業開発推進にプラスとなる要因(Society 5.0 と産学連携施策の推進、人口減少・高齢化社会への対応、非対面コミュニケーションの進展)が存在する一方で、研究・事業開発に直接的に影響を与えるマイナス要因(エンジニアリング業界の不況、コロナウィルス感染対策の継続)も発生しました。加えて写真1.3 に示されるように、我々が対象とした業界において、新規参入、代替品の提供を行う、強力な競合他社製品が現れてきました(ボストンダイナミクス/スポット、ユニツリー社/A1、三菱重工/EXROVR)。


そのような環境の変遷の中で、研究開発は限定的になり、事業開発においても、選定した事業パートナー、サプライ・技術パートナーが経営難に陥るというような状況に遭遇しました。残念ながら、我々が目指したサービスロボット社会実装の実現は、様々な理由で期間内実現にまでは至りませんでしたが、新たな競争的資金の獲得を目指して現在も研究・事業開発を継続中です。
1.2 産業用ロボットとサービスロボット
1.2.1 ロボットの分類
ロボットは、大きく産業用ロボットとサービスロボットに分類されます。産業用ロボットは一般的に6つに分類されます。①産業用ロボットの元祖である極座標型ロボット、②50年の長い伝統を持つ円筒座標型ロボット、③制御がシンプルな直角座標型ロボット、④SCARA3型と呼ばれ組立が得意な水平多関節型ロボット、⑤どんな動きも可能である垂直多関節ロボット、⑥とにかく早く動けるパラレルリンク型、の6つがあります4。
サービスロボットにはいくつか分類方法がありますが、ここでは二つほど紹介をします。まずは、“International Federation of Robotics”(国際ロボット連盟)が示す分類です。①自立走行搬送ロボット、②清掃・消毒ロボット、③医療・リハビリロボット、④テレプレゼンス型ロボット、⑤自動化レストランロボットです5。
二番目に、“社団法人日本ロボット工業会”が示す、業務用ロボット、家庭・個人用ロボットという分類です。業務用ロボットには、①農林水産、②清掃、③点検・保守、④建設・鉱業、⑤災害対応、⑥特殊環境(宇宙、原子力、水中)⑦警備、⑧物流・搬送、⑨医療、➉福祉(自立支援、介護、介助支援)⑪教育・研究・試験、⑫エンタテイメント、⑬受付・案内が、家庭・個人用ロボットには、①清掃、②家事支援、③趣味・娯楽・教育、④自立支援、⑤介護・介助支援という分類があります6。
1.2.2 日本が誇る産業用ロボット
日本は世界最大の産業用ロボット生産国と言われています。中国の台頭著しい中で、世界の産業用ロボット供給量の45%を日本が製造しています。輸出率は78%(136,069 台を輸出)、36%が中国向けです。輸入率は僅か2%(日本企業が使用)しかありません。世界で使用されている産業用ロボットの50%が日本製であると言われています7。
2020 年度における産業用ロボット設置数を国別にランキングしてみると、1位:中国168,400 台、2位:日本38,700台、3位:米国30,800台、4位:韓国30,500台となっています。また、ロボット設置数を製造業社員10,000人あたりの指標でみると、1位:韓国 932台、2 位:シンガポール 605台、3位:日本 390台、となり、中国は246台で9位となっています。
この産業用ロボットを世界的にけん引しているのが日本のロボットメーカーです。FANUC は世界市場の15%を占め、生産量世界第2位である日本の代表的メーカーの一つです。2021年に産業用ロボット製造数が75万台に到達しました。業界のマイルストーン数値制御装置(NC)のパイオニアで、コンピュータ数値制御装置(CNC)市場の50%を占めています。安川電機は世界市場10%を占め、生産量で世界第3位となっています。機械を高精度に回転・移動させるキーパーツであるサーボモータのグローバルリーダーであり、ロボットアームのメーカーとしても高い競争力を持っています。川崎重工は世界市場8%を占め、生産量で世界第7位、日本の産業用ロボット市場における先駆者として有名です。
以降、ヤマハ発動機(市場シェア5%:生産量世界8位)、エプソン(市場シェア2%:生産量世界第10位)、不二越(市場シェア1.6%:生産量世界第11位)と続きます。海外メーカーとしては、ABB(スイス)が市場シェア16%を占め、生産量世界第1位 、KUKA(ドイツ)が市場シェア8%で、生産量世界第6 位となっています8。
しかしながら、世界的に最も権威がある“International Conference on Robotics and Automation”に提出された論文数で、日本は2019年に初めて7位に転落しました。2000年代においては、日本と米国が論文数でトップを争っていました。これまで産業用ロボットに関しては、生産力、技術力、共に日本がリードしてきましたが、今後は競争が厳しくなることが予想され、産業用ロボットにおける日本のリードに関しては予断を許さない状況にあります。
1.2.3 サービスロボットの世界市場
次にサービスロボットの現状について説明をします。サービスロボットは、DX の推進と共に普及して来ており、需要は2020年から2025年にかけて倍増すると予測されています9(表1-1参照)。背景には、企業活動における自動化推進、省人化推進、コロナ感染対策として普及した非接触対応・在宅勤務の増加、医療業務における業務負担の軽減等、があります.

サービスロボットの普及状況に関して、もう少し詳細に説明します。 家庭用は、新型コロナ流行から世界的に在宅時間が増え、スマートスピーカー、家庭用清掃ロボット等に対する需要が増加しました。建設/物流・搬送/レスキュー/インフラ/農業用に関しては、少子高齢化人口減少から潜在的に発生しつつある労働力不足に対応するように、需要が増加しています。具体的には、空撮、農薬散布、測量、構造物点検、配送用として、ドローン・無人ヘリ等のUAV が、製造・物流業で省人・無人化対応として自動搬送車等のUGV が代表的なものです。医療・介護用においては、人手不足対策として、医師・看護師を専門の医療業務に専念させる環境整備として発展してきています。手術ロボット、リハビリロボット、診療補助ロボット、調剤ロボット、紫外線照射ロボット等が挙げられます。オフィス・店舗用は、オフィスへの訪問制限、省人化、業務効率化により進展しています。搬送・受付等オフィス用ロボット(テレプレゼンスロボット含む)、調理ロボットが代表的な例です。
最後にAI・人工知能/RPA ですが、これはロボットというよりシステムとして捉えた方が良いかもしれません。在宅勤務の拡大や働き方改革等から業務の効率化が求められ、業務プロセスに対してDX 化が進み、機械学習、深層学習を含めたAI とロボットプロセスの統合化が進められ生まれてきました。代表的な例として、疾病診断支援ロボット、コールセンター支援ロボット、金融ロボット等が挙げられます10。
1.3カギを握るサービスロボットの普及
これまでのロボティクス時代は、長期的な奇跡的経済的成長、自動車製造業の台頭、戦後の労働力不足の状況等の環境下にあり、日本は産業用ロボットの大国に成長しました。これからのロボティクス時代は、これまでの社会的、経済的環境とは全く違った状況に置かれることになります。これからの社会的、経済的環境変化の中で一番のインパクトは、少子高齢化、人口減少に起因する労働力不足であろうと推察されます。従って、産業用ロボットに加え、様々な社会的・経済的活動を支えるサービスロボットの普及・活躍が、経済・社会の原動力となることが予想されます。
ここで2021年9月に行われた、ソフトバンクのオンラインイベント“ソフトバンクワールド”での孫社長によるプレゼンテーションコメントの一部を紹介したいと思います。孫氏はここで、“日本の競争力復活のカギはスマートロボット(スマボ)である”と主張しました。日本は現在、世界競争力ランキング11(経済状況、政府の効率性、ビジネスの効率性、インフラの観点で各国を総合評価)で33 位、米国と比べて最先端テクノロジー活用にも遅れています。孫氏は日本復活のカギは、スマートロボットの活用であり、ソフトバンクの主要な投資事業であるソフトバンク・ビジョンファンドの余裕資金を、将来的にDX 進展の中で発展を見せるスマートロボットへの投資に充てていくと強調していました。
今後、様々な分野においてどのようにサービスロボットの差別化を図るのかが、競争優位獲得と普及の重要な鍵となりますが、まさに差別化は最先端テクノロジーの活用にあることはいうまでもありません。言い換えれば、AI、IoT 等、様々なデジタル技術と統合されることが差別化の源であると思います。次の章では、サービスロボットがデジタル技術と統合する例として、化学プラントエンジニアリング業界におけるプラントデジタルツインを紹介したいと思います。
2.デジタルツインで日本の産業が世界をリードする
2.1 デジタルツインとは何か?
2.1.1 デジタルツインの概要
まずはデジタルツインの例として、NVIDEA とBMW が進めるスマートファクトリーの例として、デジタルツインを適用した自動車生産工場のデモビデオを見ていただきます12。

デジタルツインの具体例を紹介したことで、どのようなものかを理解していただいたと思います。デジタルツインとは、“現実(物理)空間の情報をIoT 等を通じて送信されたデータを基に、仮想(サイバー)空間で現実(物理)空間を再現する技術であり、デジタル空間上に再現された空間で様々なシミュレーションを実施することで、現実空間で起こり得る将来の予測をすることが可能”となります。
現実世界の環境を仮想空間にコピーするイメージで「デジタルの双子」の意味で”デジタルツイン“と呼ばれます。様々なデジタル技術が統合されて実現するシステムであり、リアルタイム性と現実世界との連動性から様々な用途に使用されることが期待されています。デジタルツイン世界市場は平均年率約59%で成長しており、2026年には502億ドル(6 兆円 1$=120¥)に達すると予想されています13。
2.1.2 デジタルツインの主な技術と利点
デジタルツインは様々なデジタル技術が統合されたシステムです。デジタルツインを実現させる主なデジタル技術には、次のようなものがあります。
①IoT:高精度の仮想空間を作るため、センサーを介して多くのあらゆるデータをインターネットに接続しクラウド上に集積させる技術、②5G:データを大容量、超高速、超低遅延で送受信させ、リアルタイムで仮想空間へデータ反映を可能にする通信インフラ(2020 年に商用化が本格的に開始)、③AI:クラウド上に存在し、仮想空間で再現された物理空間の高精度な分析と意思決定を行う情報処理システム(機械学習や深層学習処理装置)、④V R(仮想現実)、AR(拡張現実):物理空間を再現した仮想空間内でシミュレーション・将来予測を視覚化したりすることで物理空間へのリアルなフィードバックを可能にする技術
また、デジタルツインは、産業の様々な分野で適用されることが期待されており、製造業で実現される利点に関しては、以下のものが挙げられます。
①現実空間で発生する問題を仮想空間でリアルタイムに把握、素早く解明・改善することが出来るようになるため、設備保全システムに適用することが可能です。②仮想空間で、何度でも試作を繰り返すことが出来るようになるため、品質向上を図ることが可能となります。③試作からライン稼働まで予測し、開発・製造を開始することが出来るようになり、リスク低減を図ることができます。④仮想空間のシミュレーションで、人やモノをリアルタイムに最適化することが可能となり、最適なスケジュールで製造を進めることが出来るようになります。⑤仮想空間でのシミュレーションにより、開発・試作・改善を効率よくすることができるようになり、コスト削減を図ることができます。⑥仮想空間でスケジュール化し、顧客とのネットワーキングを構築することで、自動でタイミング良くサポート提案ができるようになり、アフターサービスを充実させることが出来るようになります。
製造業以外でもデジタルツインの活用が始まっており、気象災害、CO2 排出削減、食糧問題等、社会課題の解決に向けて重要なツールとなりつつあります。
2.2 プラントのデジタルツイン
2.2.1 プラントのデジタルツイン概要
2.1 のデジタルツインと同様に、プラントのデジタルツインのデモビデオを紹介したいと思います。これは、ノルウェーの製造業者向けソフト会社のデモビデオです14。
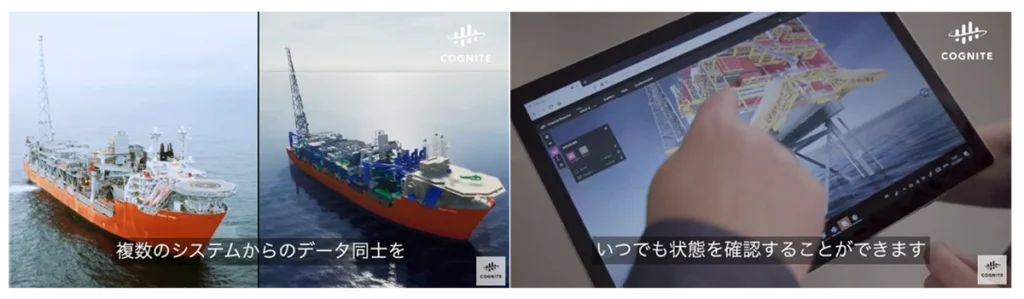
2.1 において、デジタルツインを使用することで、現実空間に発生する問題を仮想空間でリアルタイムに把握、素早く解明、改善することが出来るようになることを説明しました。プラントのデジタルツインとは、プラントエンジニアリング分野で様々なプラント設備に適用されるデジタルツインを意味します15。

プラントのデジタルツインを適用することによって、各種プラントにおいて、現実のプラントと仮想空間プラントとを連携し、現実のプラント状態を仮想空間プラントにて確認、活用、分析することが出来るようになります。具体的には、クラウド上の3D プラント情報プラットフォームにAI や生産最適化・故障予知・プラント保全に関するデータ分析を行う各種アプリケーションを連携させることによって、実プラントの設計・運転・保全・検査の最適化・効率化が図れるようになります16。
プラントのデジタルツインと自動巡回監視ロボットは、最終的に技術として統合される必要があり、その技術が実現されることでプラントの無人メンテナンス化が実現されることになります。従って、レスキューロボットのデュアルユース化としての自動巡回監視ロボットの開発を、今後共促進させていくことが極めて重要なことになってきます。
2.2.2 プラントエコシステム
プラントのデジタルツインを適用し、プラントに必要なあらゆる経営資源を連携させることによってネットワーク化を図り、エコシステムを形成することが可能になります。そうすることで、次々と関係するシステムにおいて技術革新が生じることになって行きます。デジタルツインを中心にしてプラントエコシステムとして発展した次世代プラント操業の概要が、図2.2 に示されています。
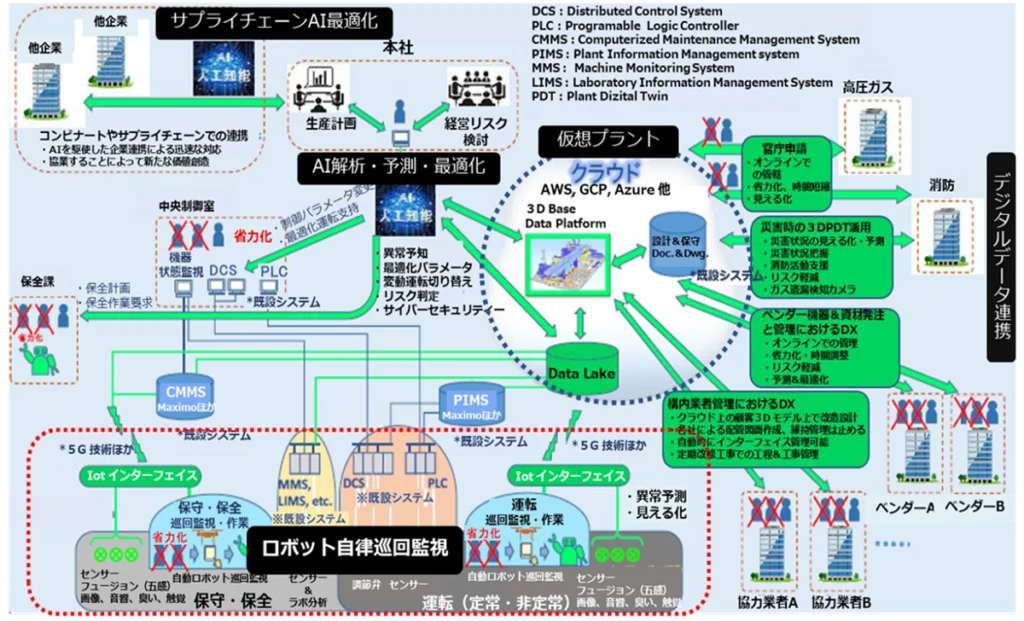
クラウド上には、設計情報やプラントの環境情報とリンクした3次元情報プラットフォームが仮想プラントとして存在しています。仮想プラント上にあるデジタルデータは、該当するプラントそれぞれに対して、ガス会社、消防、プロジェクトに携わった協力会社やベンダーの保有するデジタルデータと連携され、様々な関連する業務の効率化が図られます。
また本社レベルでは、仮想プラントにAI を連携させ、生産計画の判断やプロジェクトリスクの検討等の経営判断に関して、解析・予測・最適化を図ることが出来るようになります。プラントの状態監視や保守活動に関しては、既存の中央制御室や保全課のシステムと統合されることで、省力化、最適化が図られます。
さらに将来的には関連する会社のクラウド上の仮想プラントとデータ連携する(AI を介在させることも有り得る)ことで、コンビナートやサプライチェーンで連携し、サプライチェーンの最適化を図ることが出来るようになります。
プラントの無人メンテナンス化は、プラントのデジタルツインを適用する究極の目的であり、自動巡回監視ロボットが技術的に統合されることで実現されるようになります。ロボットは、遠隔運転や自律走行しながら、搭載するカメラによってプラントの状態監視や、プラントの配管等に設置されたセンサー類による温度・流量・圧力等のデジタル情報の保管等を行うことになります。そして、非常時対応として冒頭のデモビデオで示したように、バルブ操作なども実施します。
2.3 プラントデジタルツイン実現に向けて
2.3.1 技術的課題
クラウド上の仮想空間であるプラントのデジタルツイン環境と実空間におけるタブレット端末やHMD 等のモバイルとの連携(データ活用。データ送信)は、ある程度実用化が進みつつありますが、プラントのデジタルツイン環境下で有効に自動巡回監視ロボットが連携・機能する方法に関して、技術は未確立です。
自動巡回監視ロボットには、プラント機器・配管の状態監視目的の画像センサー、異常音を検知する音響センサー、以上臭を検知する臭いセンサー等が搭載されます。また、ロボットが自律走行制御するための感知部にあたるカメラやライダーが搭載されます。自動巡回監視ロボットは、中央監視室と連携されますが(将来的にはAI を介して行われる)、センサー情報のデータ送信、自動巡回監視ロボットの位置・向き傾き・速度情報のデータ送信、自動(自律)運転と遠隔運転の切り替え、自動巡回監視ロボットへの操作指示(巡回回路の決定、移動目標、計器読み取り、アーム操作等)に関して、ロボット側が主体となるのか、クラウド側が主体になるのか、中央監視室のどの機能と連携させるのか、に関して今後具体的な検討と技術開発が必要です。
2.3.2 実現のためのロードマップ
日本ではこれから30年の間に70%の確率で大地震が発生すると予想されています。東日本大震災で明らかになりましたが、大災害発生確率が高い石油化学プロセスプラントを海岸周辺部に数多く持つ日本にとって、防災はもちろんのこと、災害発生時の対応が重要であることが判明しました。その災害対応として、レスキューロボットの装備は必要不可欠なものと思われます。しかしながら、企業が災害時にしか使われない機械であるレスキューロボットを事前装備することは、コスト的に難しいと経営的に判断されます。
従って、常時にはプラントのメンテナンス用自動巡回監視ロボットとして使用し、非常時にレスキューロボットとして使用するという考え方が理に適っているわけです。レスキューロボットのデュアルユース化としての開発は、公共性が高く、最先端のDX 技術のシステム統合が必要で、単一企業で実現できることではなく多くのステークホルダーの関与が必要であるという研究開発の性格から、産学連携で進める典型的プロジェクトであると思われます。まだ技術的な統合が確立されている訳ではなく、日本が世界で優位に立てる可能性は十分に存在する技術開発と考えられます。
自動巡回監視ロボットを含めて、プラントのデジタルツインの実現は、プラントエンジニアリング業界では、プラントのスマートメンテナンス化ということで考えられており、幾つかの団体で構想が掲げられ、実現に向けての活動が始められています。ここでは、スマート保安官民協議会・高圧ガス保安部会が提示したロードマップに関して説明をします。2030 年までの長期的なスパンで、短期、中期、長期に分けて技術開発の方針を提示しています。
① 情報の電子化
デジタルツインの使用をベースにしたプラントメンテナンスのスマート化に向けて、まず重要なことは、プラントメンテナンスに関するあらゆる情報を電子化(センサー、カメラからの情報等)することから始まります。そうすることによって、データベースを構築し、情報の可視化と閲覧が可能となり、長期的にデジタルツイン技術が進展すれば、シミュレーションと状態可視化が可能となります。
② 現場作業の効率化
上記に示したように、情報の電子化が進めば、知識データが蓄積され、データベースが構築されるようになります。それを活用することで、発生事例を用いた原因対策を提示して予防保全が出来るようになります。XR(AR,VR,MR 等)技術、ウェアラブル端末、5G 通信技術の活用によって実現されます。運転・点検は、中長期的にドローンを含めた点検操作ロボット(自動巡回監視ロボット)によって遠隔操作、状態監視が行われ、複数事業所の一括運転監視が中長期的に実現されるようになります。
③ 意思決定の高度化
現在、プロセスプラントの状態監視は、中央監視室において人的に行われています。将来的に短中期的には、プロセスデータを基にした運転の異常検知、画像認識による亀裂や腐食等の異常検知が、AI の判断・意思決定によってできるようになります。また中長期的には、作業員の安全確保やウェアラブル端末を利用したリアルタイムの異常検知ができるようになると予想されています。AI により予防保全的運転・点検の自動化が進み、万が一の異常発生時においても、自動制御されるようにプラント運転・保全の自動化が進められて行きます。
④ スマート化・DX 化に向けた組織改革
様々な業務プロセスにおいてデジタル技術が適用されるに伴い、デジタル技術がより良く機能するためには、技術を使用する組織が状況に適合する必要があり、企業組織の改革・改善が必要になってきます。デジタル技術の適用により、プロセスの一部が不必要になったり、全く違ったプロセス・方法で業務を行う必要が出てきます。場合によっては痛みのある改革も必要になるかもしれません。そういった改革に対して、経営トップのビジョンとコミットが重要であり、そのリーダーシップの下で、人材育成等の仕組みの構築や業務プロセスの改革・改善等が実施されることになります。一朝一夕でできることではなく、長期的なスパン(10 年レベル)で考える必要があります。
3.ロボティクス開発の背後にあるイノベーションと理論
3.1 発展するデジタル技術
3.1.1 デジタル技術の分類
これまで、ロボット開発(特にレスキューロボット)、デジタルツイン(特にプラントのデジタルツイン)に関して説明をしてきました。その背後にあるのはデジタル技術の発展であり、2.1.2 では、デジタルツインを構成するデジタル技術の一部を紹介しました。ここでは、理解のためにビジネスに採用されている様々なデジタル技術を分類して説明をしたいと思います。
まず、取引の安全性を確保するための技術としてセキュア取引技術があり、具体例としてブロックチェーン技術があげられます。ブロックチェーンは、仮想通貨と同一視されることが多いのですが、“情報通信ネットワーク上にある端末同士を直接接続して、取引記録を暗号技術の適用によって分散的に処理・記録するデータベースの一種”と解釈されます。暗号技術を持ったデータベースであり、関連する企業間での取引プロセスの効率化と安全性を確保できるため、契約、サプライチェーン、証券取引、医療プロセス、不動産取引等、様々な分野の用途に適用されつつあります。
2.1.2 で簡単に説明したように、通信技術としての5G は、データを大容量、超高速、超低遅延で送受信させる通信インフラで、2020 年に商用化が本格的に開始されています。予測技術としてビッグデータとAI が挙げられます。ビッグデータとは、“社会・経済の問題解決や、業務の付加価値向上を行う、あるいは支援する事業に役立つ知見を導出するためのデータ”です17。典型的なデータベースソフトウェアが把握・蓄積・運用・分析できる能力を超えたサイズのデータ(数十テラバイトから数ペタバイト)量を扱います。AI は、その膨大なデータを効率的に分析します。単純な制御プログラムから、洗練された極端な数の入力(データ)と出力の組み合わせを関係づける方法であり、①検索 エンジンに代表されるようなビッグデータの自動判断を行う機械学習、②機械学習を行うデータを表す変数自体を学習する深層学習(ディープラーニング)があります18。
認識技術としてIoT、AR/VR の技術があります。IoT センサー設置のモノがインターネットにつながり、モノ同士、人とモノとが相互通信できることによって、ビジネスにおいて①サービス化、②リアルタイム化・ボーダーレス化、③需要と供給一致の最適化、④マスカスタマイゼーション化、が実現されます19。AR(Augment Reality)は現実の環境を拡張する技術で、実際の景色にデジタルエレメントを追加し世界を拡張、現実の環境と共存するように設計されます。VR(Virtual Reality)は、ユーザーの現実世界を仮想的な世界に置き換える技術でシミュレーションした環境に現実の環境を置き換えて完全に没入できる体験を提供します20。
生産技術として、3D プリンター、建設業のBIM(Building Information Modeling)、Robotics等があります。3D プリンターは今更説明を必要としないと思います。BIM は、建築における3 次元設計情報プラットフォームであり、Robotics は、ロボット・フレーム及び機構、ロボットを動かすための動力、ロボットを制御するプログラム等を総合的に扱うシステム技術です21。
3.1.2 デジタル技術が引き起こすビジネスへの影響要因
3.1.1 で説明した5 つのデジタル技術(セキュア取引技術、通信技術、予測技術、認識技術、生産技術)の影響は、バリューチェーン(ビジネスにおけるシステムやプロセス)に影響を与える要因として4 つにまとめることが出来ます。
まず、製品やサービスのデジタル化です。これは、製品やサービスそのものがデジタル技術に置き換わるものです。ビジネスの主体者が顧客接点においてデジタル技術からなる商品やサービスを提供します。具体的な例を挙げると、電子書籍、電子設計図(3DCAD)、ライドシェアサービス等が挙げられます。電子書籍や電子設計図は、紙媒体が電子媒体に変わることで利便性が向上しました。また、ライドシェアサービスは、電話連絡からインターネットを通じた予約システムで効率性が向上しました。
次にプロセスのデジタル化です。デジタル技術の適用によって、それまで人によって行われていたビジネスのプロセスの一部が、不必要になったり、統合されたりすることによって効率性が向上しています。代表的な例として新幹線EX 予約、3D プリンター、RPA22が挙げられます。EX 予約によって、新幹線乗車券を窓口で購入し改札口で確認されるという行為が、インターネット予約と改札口でのカード確認で済むようになり、効率性が向上しました。3D プリンターの適用は、生産方法・プロセスを変革し、更に根源的に覆す可能性を秘めています。RPA の採用は、人力による定型事務作業を大幅に減らし、業務の大幅な効率化をもたらしています。
3 番目に認識領域のデジタル化です。これは、現状把握のツールによって作業の見える化という技術として発展してきました。近年、AI を利用し予測・意思決定をするという意思決定領域のデジタル化と統合されて推進が図られています。具体的な例を挙げると、スマートファクトリー、スマートメンテナンス、スマート医療等が挙げられます。これらに共通することは、動画・静止画等の大量の画像データを取得(撮影技術の進展)し、AI を通じて目的に応じて分析・意思決定まで行うということです。具体的には、スマートファクトリーやスマートメンテナンスにおいてVR 技術が適用され、ビジュアル化された実世界情報の理解がしやすくなったり、AR 技術による実世界の将来予測が可能になったりしています。
3.2 デジタル技術はなぜ進展するのか?
3.2.1 情報の非対称性の改善と取引コストの削減
それでは、なぜビジネスにおいてデジタル技術が進展していくのでしょうか?下記に説明するように、取引コスト理論23を用いて説明できると考えています。
3.1.2 で説明した、製品やサービスのデジタル化、プロセスのデジタル化、認識領域のデジタル化、意思決定領域のデジタル化に代表されるビジネスへの影響要因は、ビジネスプロセスで扱われる情報に関係しています。上記一連のデジタル化は、複合的に関係してビジネスプロセス上で扱われる、①情報量と情報到達度、②情報の透明性、③情報の伝達性、を向上させます。
それらの向上によって、ビジネスに関与するステークホルダー間に存在する“情報の非対称性”及び“人間の限定合理性”に基づく誤解や勘違いが改善、または生じなくなると想定されます。従って、ビジネスに関与するステークホルダー間に発生する“機会主義的行動”が抑制され、取引コストが削減されると考えられます。実際に取引コスト理論に基づく説明は、様々なビジネスにおいて成立しており、3.1.2 において説明されている効率性向上の例は、取引コスト理論を適用した説明が正しいことを明確に物語っていると思います。
3.2.2 デジタル技術によるビジネスへの影響のまとめ
この章において、これまでの議論をまとめると図3.1 のように表されます24。
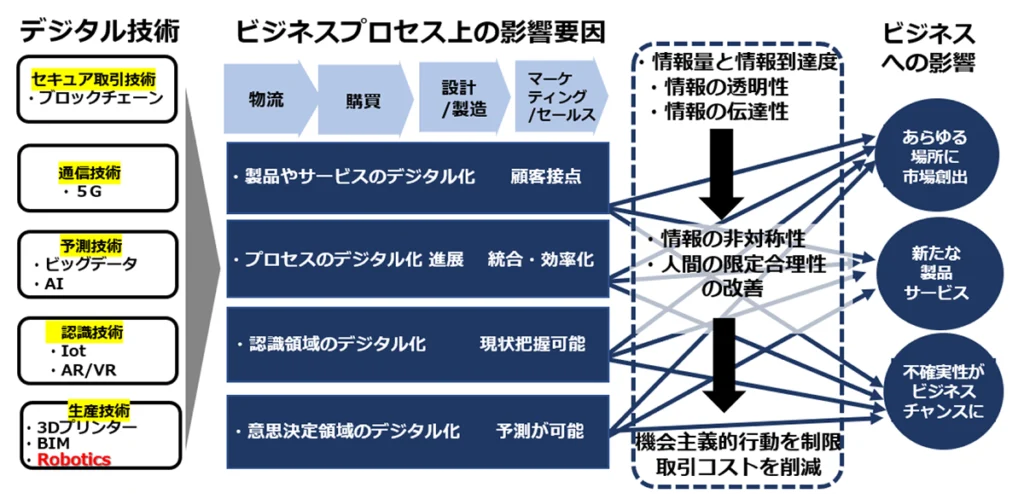
デジタル技術の進展は、ビジネスプロセス上における4つの影響要因で説明され、顧客との接点を変え、プロセスの統合・効率化を進め、現状把握を可能にし、不確実な未来の予測を可能にして意思決定を促進します。これらは、相互作用と複合的な関係で展開されて行きます。3.2.1 で説明したように、最終的に取引コストが削減されることによって、あらゆる場所に市場が創出され、新たな製品やサービスが生まれ、将来における不確実性がビジネスチャンスに変わり、次々とビジネス機会を生じさせるエコシステムを形成していくと考えられます。
4.産学連携による新たなプロジェクトの推進
最後のトピックとして“産学連携による新たなプロジェクトの推進”と題して、①産学連携の状況と課題、産学連携プロジェクトである京都大学インキュベーションプログラムに自ら関わった経験を踏まえて、②産学連携プロジェクトのプロセスと体制・組織の事例紹介、そして、産学連携を進める組織として国が推薦する③技術研究組合で進める産学連携、に関して説明したいと思います。
4.1 産学連携の状況と課題
4.1.1 産学連携施策の推移
1995年以降、図4.1 に示されるように、文部科学省の施策として産官学連携に関して様々な施策が実施されてきました。2004年に国立大学の法人化、2008年に研究開発力強化法、2013年に研究開発力強化法改正、が施行される等、海外の大学、特に欧米の大学の産学連携推進策を参考にして積極的に実施されてきました。これまでに実施されてきた施策は、3つの段階に整理されます。①産学連携を実りのあるものとするための体制整備・システム改革、②企業側の資金提供を活発化させるプロジェクト型研究開発の推進、産学連携の主目的である③大学発ベンチャーの創出支援、です。
2020 年以降は、拠点大学を中心に地域ぐるみでイノベーションを起こし、スタートアップを促進しようという、“イノベーションエコシステムの形成”に対して焦点が当てられています。
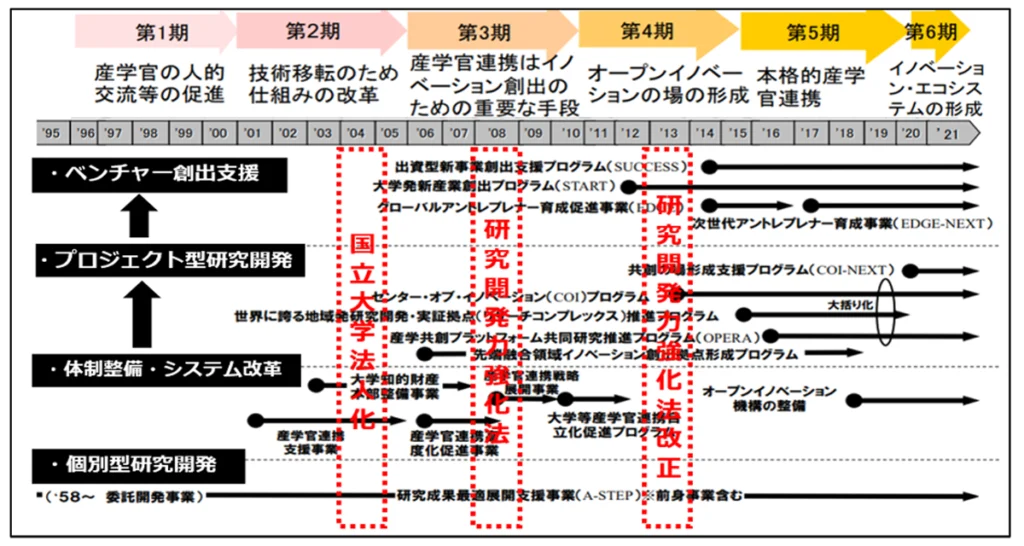
図4.1 文部科学省による産官学連携に対する施策の経緯25
4.1.2 産学連携の進展状況と課題:民間からの研究費の海外大学との比較等
4.1.1 で説明されたように、文部科学省を中心に様々な産学連携施策が実施されてきましたが、実際にどのような成果をもたらしているのか、そして将来に向けて次なる課題は何かということを探りたいと思います。
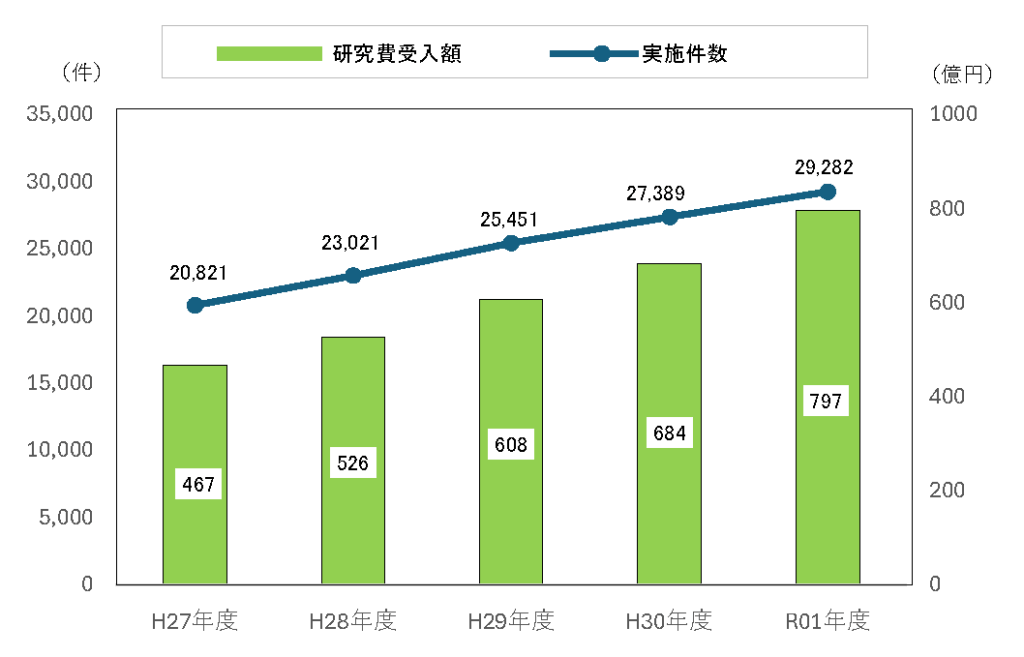
まずは、図4.2 に示される、大学・企業による①共同研究実施件数、②民間企業からの研究費受入額を見て行きます。①に関しては、2015 年の20,821 件から2019 年には29,282 件まで増加しています。②に関しては、2015 年の467 億円から2019 年の797 億円まで増加しており、明らかに施策実施の成果が見られます。
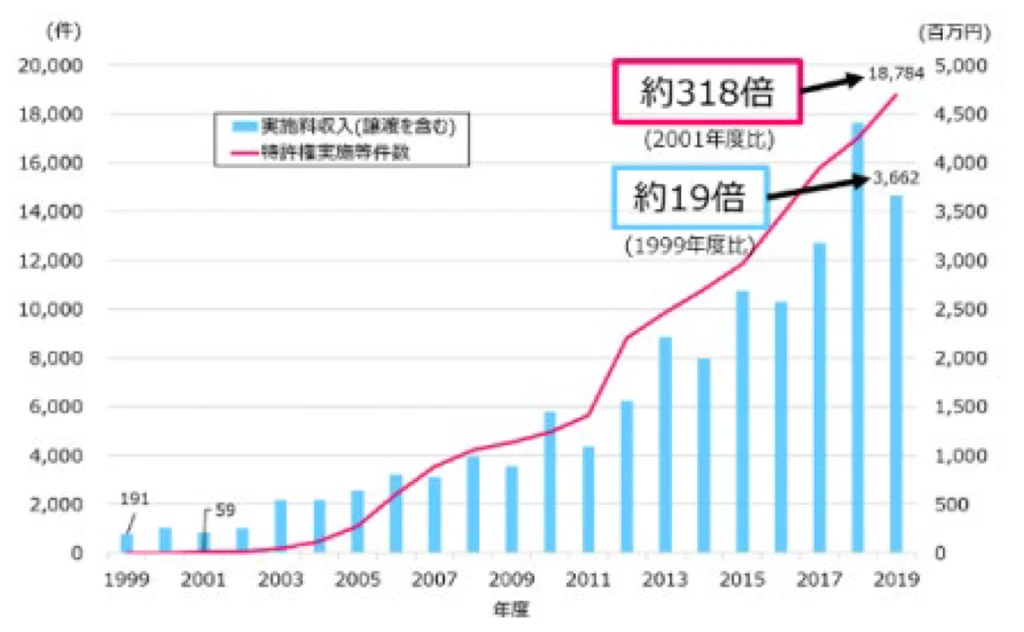
また、③大学等における特許実施許諾件数・収入額に関しては、特許の許諾件数は2001年の59件から2019年の18,754件へと318倍の増加、その実施料収入は、1999年の1億91百万円から2019年の36億62百万へと約19 倍の増加を見せています。この数字からも、明らかに施策実施の成果が見られます。
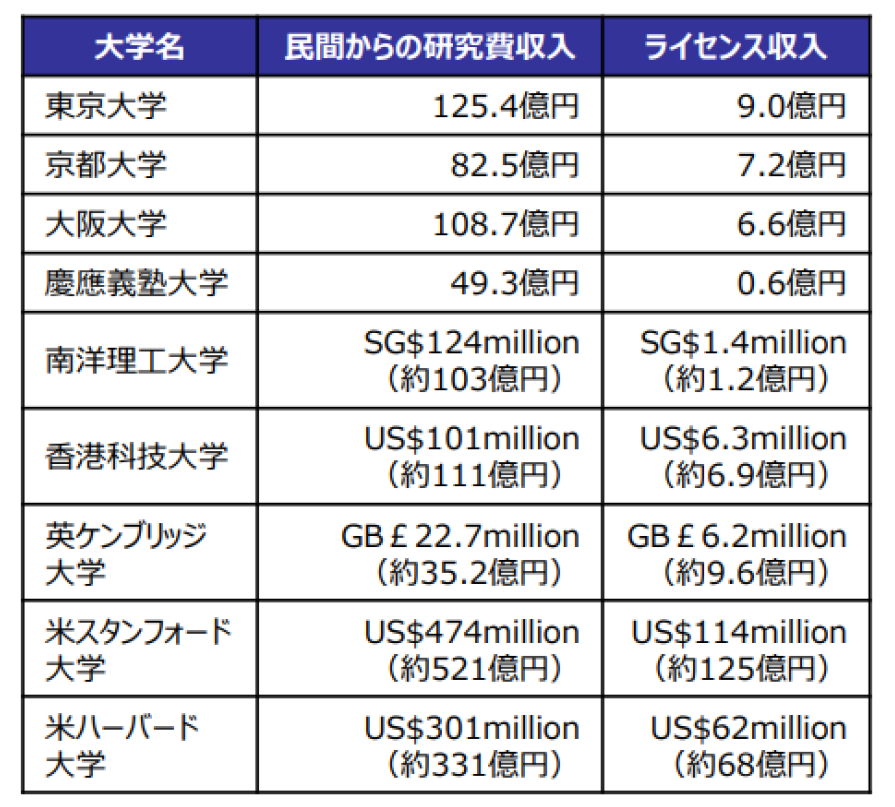
文部科学省による施策によって大学と企業間関係が、属人的関係から組織的関係へと発展したことで、産学連携による研究開発が単発的なものから戦略志向性を帯びたものに変化していく中で、成果が表れてきたものと判断されます26。しかしながら、大学への民間資金導入額に関して欧米やアジアの大学と比較してみると、日本の一流大学の場合、表4.1 に示されるようにイギリスのケンブリッジ大学やアジアの大学とは同程度ですが、米国の一流大学と比較すると、大きな差があることが分かります。
筆者の私見ですが、米国では各地域に拠点となる大学があり、そこにビジネススクールが存在しています。ビジネススクールはいわゆるMBA を輩出する職業大学院ですが、大学と企業を結びつける役割を果たしています。更に、ビジネススクールのExecutive MBA コースは、企業の意思決定者であるExecutive が新たな学びをしながら人間関係を構築するという場も提供しています。従って、米国ではエリアごとに大学と企業は非常に密接な組織間関係が歴史的に構築されており、産学連携が伝統的に緊密に行われてきたのではないかと考えられます27。
4.1.3 産学連携の進展状況と課題:大学発ベンチャーに関する現状
次に、産学連携の大きな目的である大学発ベンチャーの現状と課題に関して、説明したいと思います。日本では上場した大学発ベンチャーが2021年5月31日の時点で43社存在します。時価総額で約1.9兆円と報告されています。代表的企業を上げると、ペプチドリーム(ペプチド応用バイオ企業)、アンジェス株式会社(遺伝子・バイオ企業)、ジーエスアイグループ(創薬企業。中国での新薬、臨床開発、製造販売)、ファーマフーズ(鶏卵から様々な機能性表示食品を製造)、ユーグレナ(ミドリムシが59種類の栄養素を持つことを生かし、健康食品や化粧品の製造・販売を実施)、ヘリオス(再生医療医薬品、細胞再生医薬品製造)、PKSHA technology(自然言語処理、機械学習/深層学習技術に関わるアルゴリズムを研究開発、それらを製品として社会実装)等があります。
国別のユニコーン企業(①創業10年以内、②評価額10億ドル以上、③テクノロジー企業である未上場のスタートアップ企業)を見ると、圧倒的に米国が多く2020年までに222社、中国が115社、イギリス25社と続き、日本には3社しか存在していません28。ユニコーン企業を輩出させるには、ベンチャー投資が必要であり、米国は2018年度において約14兆5千億円のベンチャー投資がありました。それに対して、日本では約2,800億円であり、50分の1でしかないという事実があります。
また、GEM (Global Entrepreneurship Monitor)29という組織が行っている調査でその指標にTEA:(Total Entrepreneurship Activity)というものがあります。これは“起業活動率”と訳されており、“起業の準備を始めている人+創業後3.5 年未満の企業を経営している人が18~64才人口100人当たり何人いるか?”を測るものです。2019年の調査によれば、代表的な国のTEA は、日本5.4%、中国8.4%、イギリス9.3%、イスラエル12.7%、米国17.4%となっています。
4.1.4 産学連携施策の進展と課題:大学発ベンチャー創出・成長に関する日米比較
大学発ベンチャー創出・成長に関して日米を比較した際の概念図が、図4.3 です。
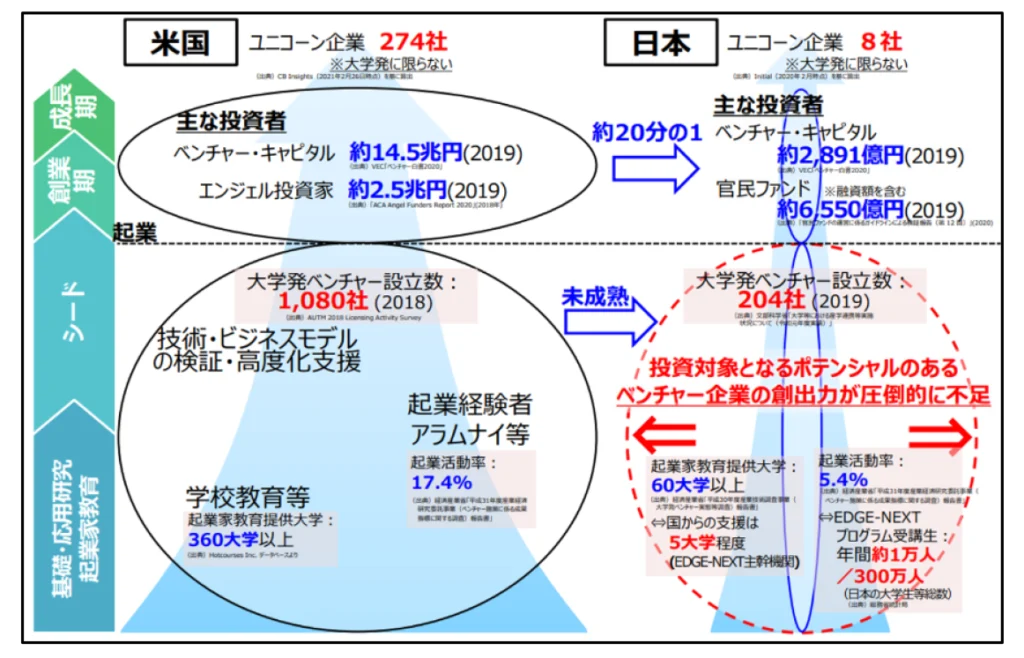
基礎・応用研究起業家教育の段階から始まり、シード段階、創業期、成長期に渡り、①学校教育、②起業活動率、③大学発ベンチャー設立数、④主たる投資者・金額に関して、日米の比較が行われています。日本の人口は米国の3分の1、日本のGDP は米国の4分の1ですが、この指標以上に差があり、上記①、②、③に関して日本は未成熟であり、④の投資に関しても、日本は米国の20分の1であり、大きな差があることが分かります30。ここに現れるような数字の差を解消するように、ボトムラインとして、人口比、GDP 比と同等になるレベルにまで、様々な施策(教育と投資)を施行し、努力を積み重ねる必要があると考えます。
4.2 産学連携プロジェクトのプロセスと体制
ここでは産学連携を進めるにあたって、考慮しなければならない、研究・事業開発プロセスと体制に関する件を、自らの経験に基づいて説明したいと思います。
4.2.1 スタートアップへの研究開発と事業開発のプロセス対応
大学で行われる一般的な研究開発プロセスは、開発計画、開発設計、プロジェクトで目指すプロトタイプの製作や試運転を実施して、その成果を論文にするという事で完結します。産学連携で行うプロジェクトにおいても同様です。目的がスタートアップでなければ、論文発表という事でプロジェクトは終了します。図4.4に示されるStep.1に該当します。
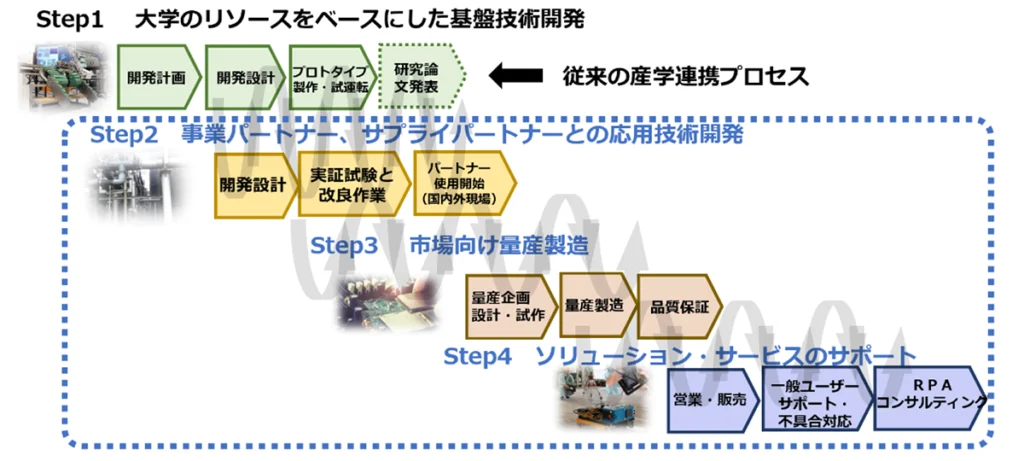
ロボットビジネスのスタートアップという事になると、社会実装という観点で大学レベルのプロトタイプを現実に使えるロボットとして改善、改良を加えなくてはなりません。実際にロボットの適用を考慮している企業(事業パートナー)のニーズに従って、大学レベルの基礎技術開発から応用技術開発が必要になり、企業(技術・サプライパートナー)と共に技術開発を進めることになります。そのプロセスがStep.2のプロセスとなります。更に、Step.3に示されるような量産化となれば、技術・サプライパートナーが製造大企業でない場合、新たに企業を探す必要があります。加えて、一台でも市場に提供という事になれば、不具合対応を始めとしてユーザーサポートを行わなくてはならず、比較的短期間の間に広範囲な対応の為、体制確立をしなければなりません。
4.2.2スタートアップへの研究開発と事業開発の組織体制対応
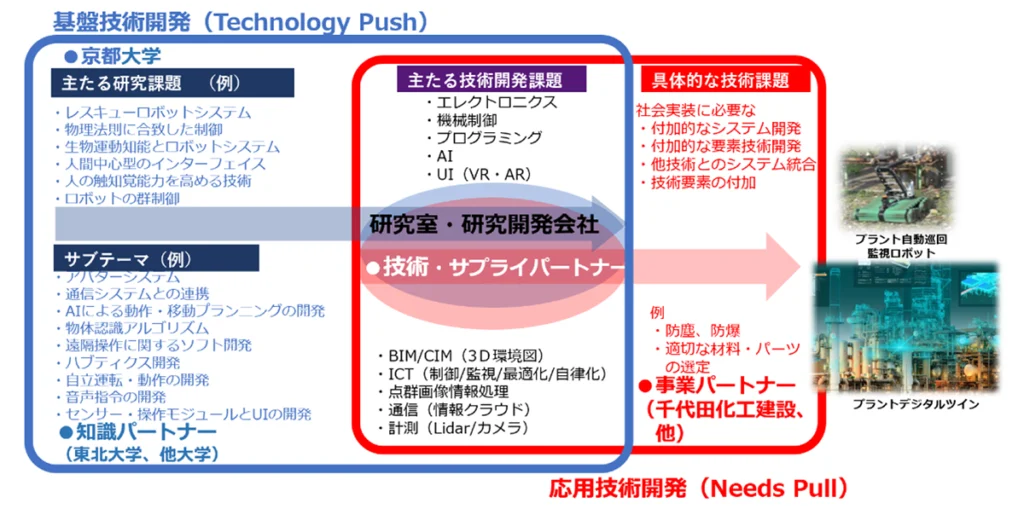
大学が主体で実施する基盤技術開発と企業側が主体で実施する応用技術開発は、明確な境界があるわけではなく、むしろ重なり合っており、図4.5に示されるようになっていると考えられます。青枠は京都大学松野研究室が主体になる基盤技術開発であり、赤枠は事業パートナーの市場ニーズと基盤技術開発に対応する応用技術開発を示しています。
我々が従事した京大インキュベーションプログラムにおいては、市場ニーズを把握し、社会実装レベルに達するロボットを提供できる段階で、事業パートナーとなりえる企業と具体的な連携を進めていました。しかしながら、複数の技術・サプライパートナー候補とあるレベルまで応用技術開発は進展したものの、主にコロナウィルス感染対策が大きく影響し、加えて経営的な理由から、彼らと起業するというレベルにまでは至りませんでした。
4.3 産学連携プロジェクトを進める技術研究組合
4.3.1 技術研究組合の概要
ここでは、京都大学インキュベーションプログラムにおいて、レスキューロボットのデュアルユース化として社会実装を目指し、研究・事業開発を進め、スタートアップを実現しようと試みた技術研究組合という体制に関して説明したいと思います。基本的概要は、図4.6に示されます。

図4.6 技術研究組合概要31
技術研究組合は、複数の企業、大学、独立法人等が大小の区別なく共同して試験研究を行うための法人で、組合員は企業・大学の大小にかかわらず、一企業一大学が一組合員であることが原則です。この組織のメリットは、技術組合への賦課金から取得した設備は税制上の圧縮記帳32が可能で、要件適合した場合、特許料の減免措置が受けられる可能性があります。研究開発が実用化段階を迎えた場合、組合から株式会社への移行が可能となります。組合員である企業のメリットとしては、支払う賦課金が投資目的ではなく、試験研究費として費用処理が可能であり、法人税額から20%の税額控除が可能であることです。
4.3.2 技術研究組合の事例
技術研究組合の制度は古く、1961年に開始されています。その後、2011年に制度改正され、2021年においては56組合が存在しています。研究・事業開発内容によって所轄官庁が違い、経産省管轄では44の技術研究組合が存在しています。
代表的な例がノーベル賞受賞者の吉野博士が理事長を務める“リチウムイオン電池材料技術研究組合”です。設立は2009年で、29の企業と1国立研究所が組合員となっています吉野博士がノーベル賞を受賞したこともあり、2018年における事業費は13.4 億円に上ります。33その他、大学の要素技術を基にした産学連携による共同研究の例として、“次世代型産業用3D プリンター開発技術研究合”(TRAFAM)があります。東北大、産総研、JAXAを含む34企業から構成され、世界一の造形速度、造形精度を有する次世代型産業用3D プリンターの研究開発を行っています。また、大企業間での協調領域(業界共通課題)における研究開発を行う例として、“自動車用内燃機関技術研究組合”があります。燃費向上、排出ガス低減を目指し、自動車メーカー9社、2団体等から構成されています。
4.3.3 京大インキュベーションプログラムで目指した技術研究組合
京都大学インキュベーションプログラムで目指した技術研究組合を最後に紹介したいと思います。レスキューロボットデュアルユース化技術研究組合(DURTRU)は、図4.7 に示すような組織構成を持っています。
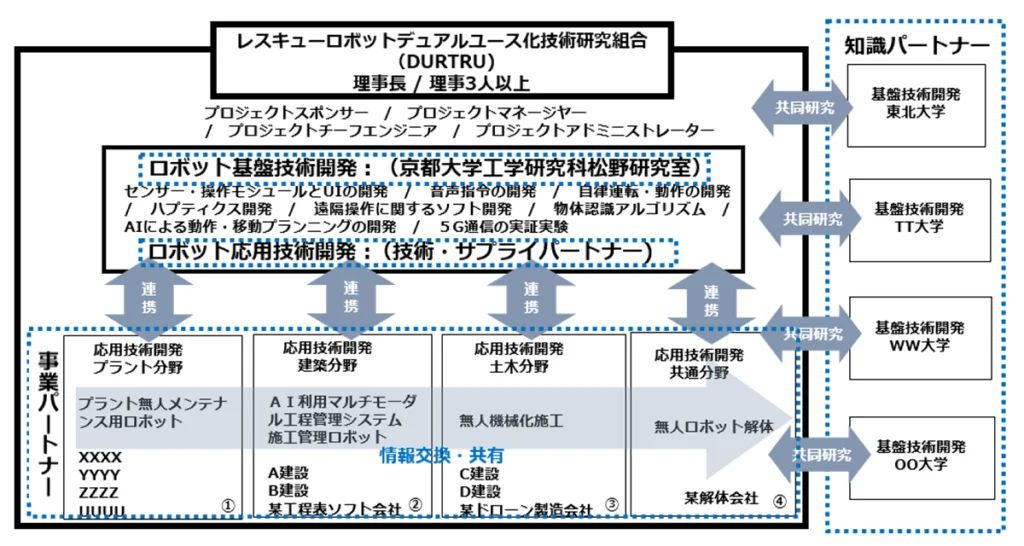
京都大学松野研究室がレスキューロボットに必要な基盤技術開発を担い、タイアップして技術サプライパートナーとなる企業が事業パートナーのニーズに焦点を合わせた応用技術開発を担います。事業パートナーは、建設業の4 分野、プラント・建築・土木・共通分野(解体)に分かれます。それぞれ、事業課題が異なり、技術・サプライパートナーと共にそれぞれの課題に対応します。プラント分野においては、メンテナンス用自動巡回監視ロボット、建築分野においては、施工用自動巡回監視ロボット、土木分野においては建設機械の群管理、共通分野においては解体ロボットを研究開発対象と想定しました。組合員は分野別に存在しますが、組織的に意見交換を行い、情報を共有します。知識パートナーは、現在東北大学との関係が構築されており、意見交換を実施しています。今後の研究開発の進展によって、連携する大学を増やしていく予定です。
おわりに
今日は、4つの分野において話をさせて頂きました。主に、①サービスロボットとして、レスキューロボットのプラント分野における自動巡回監視ロボット、②デジタル技術の最先端であるデジタルツインとその具体例であるプラントデジタルツイン、③なぜビジネスにおいてデジタル技術が発展するのかという根本的な問い、そして、④プラントデジタルツインとレスキューロボットを統合して研究開発を進める産学連携組織としての技術研究組合、です。
京都大学インキュベーションプログラムは終了しましたが、プラントデジタルツインと自動巡回監視ロボット(レスキューロボットのデュアルユース化)統合への研究開発は、競争的資金の獲得を目指して継続しています。今日の聴講者の中で事業的に興味のある企業の方がいらっしゃれば、共同研究への参加、支援は可能ですので、是非ご連絡頂ければと思います。有難うございました。
- 京都大学松野研究室のロボット研究開発への取り組み紹介https://youtu.be/5InumnppkL4 から ↩︎
- 千代田化工建設実験プラント 松野研レスキューロボットの走行・機能試験https://youtu.be/mBCwzYIsm-w から ↩︎
- Selective Compliance Assembly Robot Arm の略 ↩︎
- 川崎重工 HP 産業用ロボット基礎知識 https://kawasakirobotics.com/jp/industrial-robots/から ↩︎
- Press Conference World Robotics, Oct.28, 2021 International Federation of Robotics から ↩︎
- 社団法人 日本ロボット工業会 HP https://www.jara.jp/various/example/service/index.html から ↩︎
- Press Conference World Robotics, Oct.28, 2021 International Federation of Robotics から ↩︎
- deal lab 2022.05.24 『産業用ロボット業界の世界市場分析』https://deallab.info/industrial-robot から ↩︎
- 「2021 ワールドワイドロボット関連市場の現状と将来展望 No.2 業務・サービスロボット市場編」 株
式会社富士経済 から ↩︎ - 「2021 ワールドワイドロボット関連市場の現状と将来展望 No.2 業務・サービスロボット市場編」 株
式会社富士経済 から ↩︎ - スイスのビジネススクールIMD(International Institute for Management Development)が実施する調査 ↩︎
- You Tube https://blogs.nvidia.co.jp/2021/05/10/nvidia-bmw-factory-future/ ↩︎
- BCC RESEARCH (2022. Feb) “Digital Twin Market”, BCC Publishing ↩︎
- Cognite 社 プラントエンジニアリング会社等に3D プラットフォーム等を提供 https://youtu.be/L3f0k9Ta2eU から ↩︎
- “プラントデジタルツイン”という言葉は、千田化工建設殿が商標登録を取得した言葉で、関係する文書では、“プラントのデジタルツイン”と使われています。ここでは千代田殿の許可を取り“プラントデジタルツイン”という言葉を使います。 ↩︎
- 安井威公(2020) 「石化プラントへのAI 活用と運転&保守効率的運用のためのプラントデジタルツイ
ン」CHIYODA テクニカルレビューVol.1 No.2 ↩︎ - 総務省ホームページから。https://www.soumu.go.jp/johotsusintokei/whitepaper/ja/h24/html/nc121410.html ↩︎
- 松尾豊(2015)『人工知能は人間を超えるか?』株式会社KADOKAWA ↩︎
- 尾木蔵人(2015)『インダストリー4 第4 次産業革命の全貌』東洋経済新報社 ↩︎
- Spacely ホームページから。https://corp.spacely.co.jp/ ↩︎
- キーエンス Iot 用語辞典から。https://www.keyence.co.jp/ss/general/iot-glossary/robotics.jsp ↩︎
- Robot Process Automation ↩︎
- 新制度派経済学の代表的理論。著名提唱者は、サイモン、コース、ノース、ウィリアムソン(それぞ
れ、ノーベル経済学賞受賞者)と続く。 ↩︎ - 三品和広、山口重樹(2019)『デジタルエコノミーと経営の未来』東洋経済新報社 81 ページから引用
し筆者作成。 ↩︎ - 文部科学省 科学技術・学術審議会(2021)『産学官連携の最近の動向について』
https://www.mext.go.jp/content/20210706-mxt_sanchi01-000016609_4.pdf から ↩︎ - 文部科学省 科学技術・学術審議会(2021)『産学官連携の最近の動向について』
https://www.mext.go.jp/content/20210706-mxt_sanchi01-000016609_4.pdf から ↩︎ - 筆者は1990 年、ワシントン大学でMBA を取得、2007 年にバージニア大学でExecutive MBA を受講
し、2010 年には、UC バークレー、ワシントン大学、エモリ-大学のビジネススクールを訪問する機会が
あり、関係者からの意見も含めた経験からの私見である。 ↩︎ - プリファードネットワークス、パネイル、Freee と推定されるが、諸説あり。パネイルは2021 年5 月18
日に東京地裁に民事再生法の適用を申請。 ↩︎ - GEM とは、「Global Entrepreneurship Monitor」(グローバル・アントレプレナーシップ・モニター)の略
で、米国バブソン大学と英国ロンドン大学ビジネススクールの起業研究者達が集い、「正確な起業活動の
実態把握」「各国比較の追求」「起業の国家経済に及ぼす影響把握」を目指したプロジェクトチームが実施
する調査である。 ↩︎ - 文部科学省 科学技術・学術審議会(2021)『産学官連携の最近の動向について』 ↩︎
- 経済産業省 産業技術環境局技術振興・大学連携推進課(202011 月)『CIP〔技術研究組合〕の現況に
ついて』から。https://www.meti.go.jp/policy/tech_promotion/kenkyuu/saishin_2021/cip1.pdf ↩︎ - 国庫補助金や火災による保険金などの金銭を受けて固定資産を購入した際、その購入価額から補助金の
額を控除して購入価額とすること。 ↩︎ - 経済産業省 産業技術環境局技術振興・大学連携推進課(202011 月)『CIP〔技術研究組合〕の現況につ
いて』から。https://www.meti.go.jp/policy/tech_promotion/kenkyuu/saishin_2021/cip1.pdf ↩︎