ジャーナリスト 現研客員研究員 中村尚樹
「World Robot Summit(ワールドロボットサミット=WRS)2025 過酷環境F-REIチャレンジ」が2025年10月に開催された。大会を主催したのは福島復興再生特別措置法に基づく特殊法人の「福島国際研究教育機構」(F-REI)で、共催には経済産業省が名を連ねる。会場となったのは福島県南相馬市の「福島ロボットテストフィールド」(RTF)だ。
私は東北新幹線「はやぶさ」でJR仙台駅に向かい、常磐線に乗り換えて最寄り駅のJR原ノ町駅に着いた。東京からの所用時間は約3時間半である。
江戸時代は「相馬中村藩」の領地で、南相馬市の伝統行事「相馬野馬追」を象徴する騎馬像が駅前ロータリーで出迎えてくれる。主催側が用意したシャトルバスに20分ほど乗るとRTFに到着した。

“福島ロボットテストフィールド”は東京ドーム約10個分の広さを有する。写真左側が無人航空機エリア、中央部の建物群が研究棟、右側がインフラ・災害対応エリアだ。(提供:福島イノベーション・コースト構想推進機構)
2011年の東日本大震災と原発事故により、福島県東部の「浜通り地域」は産業空白地帯となった。その復興と新産業創出を目的に、国主導で「福島イノベーション・コースト構想」が立ち上げられた。この構想の中でRTFは移動型ロボットとしてのドローンを含むロボット、そして災害対応技術の開発実証拠点として位置づけられている。
震災による津波が押し寄せた場所にできている。東京ドーム約10個分の敷地を持つ広々とした施設内を見渡してみると、緩衝ネット付き飛行場が見える。サッカー場をひとまわり大きくしたフィールドが高さ15メートルのネットですっぽりと覆われ、航空法関連の申請なしに夜間飛行や物件投下などの飛行試験も行えるようになっている。ほかにも航空機開発の施設としては滑走路やヘリポートはもちろん、風洞棟があり、最大で風速20メートルの風を起こし、ドローンなどの特性を測定する試験を行ったり、不規則な突風に対する機体安定性の試験を行ったりすることができる。
航空機エリアの反対側には、インフラ点検・災害対応エリアがあり、高さ約20メートルの試験用プラントが見える。近寄ってみると、内部には様々な配管や階段、煙突などがあり、平時だけでなく災害時も含めたプラントを再現している。
道路を隔てた向かいには、コンクリート製でかまぼこ型の大きな施設がある。試験用トンネルで、トンネル内での交通事故や崩落事故などを再現できる。付近には試験用橋梁や瓦礫・土砂崩落フィールドがある。
市街地フィールドは大小さまざまなビルや住宅に加え、交差点のある街並みを再現している。さらに水没市街地フィールドもある。
本館機能を持つ研究棟では、ロボットの性能を評価するため防水や防塵、水圧や温湿度、振動や電波に対する試験を行うことができる。
RTFにはロボットやドローン、空飛ぶクルマの関連企業をはじめ、東京大学や東北大学、会津大学など約20団体が入居し、それぞれの分野で社会実装に向けて活動している。
World Robot Summit(WRS)発足の経緯と経過
ここでWRS発足とこれまでの経緯を紹介しておこう。そもそもは2015年に経済産業省が策定した「ロボット新戦略」にさかのぼる。この中でロボットの社会実装を推進するための具体策として、国際競技会・展示会の開催が提唱された。この戦略に基づき、経産省とNEDO(新エネルギー・産業技術総合開発機構)が中心となり、WRS構想が始動した。これを受けて2018年のプレ大会を手始めに、2021年の本大会、2024年にはWRS F-REIチャレンジのプレ大会、そして2025年の本大会と、段階的に発展してきた。このうち2024年以降に福島で開かれる大会の主催者は従来の経産省とNEDOからF-REIに交代し、経産省は共催者として名を連ね、「WRS過酷環境F-REIチャレンジ」として独立開催されることになった。
その内容を大会ごとに見てみよう。2018年10月に「World Robot Summit 2018」が、本体会に向けてのプレ大会として東京ビッグサイトで開催された。大会は競技会(World Robot Challenge)と展示会(World Robot Expo)の2本柱で構成された。競技カテゴリーは「ものづくり」「サービス」「インフラ・災害対応」、それに「ジュニア(教育)」の4分野である。
ちなみに2018年の大会で優勝したドイツ・ダルムシュタット工科大学のチームは、のちに「Energy Robotics(エナジーロボティクス)」という企業を設立し、産業用ロボットの遠隔操作・自律運用プラットフォームを開発している。この企業は、インフラ点検や危険環境でのロボット活用を目的としたソフトウェア技術に特化しており、WRSでの経験がその技術基盤となっている。
続く大会は当初、2020年に予定されていた。しかし新型コロナウイルス感染症拡大の影響で翌2021年に延期され、9月に愛知県国際展示場、10月にRTFで分散開催された。愛知会場では「ものづくり・サービス・ジュニア分野」、福島会場では「インフラ・災害対応分野」が競われた。
2024年には、翌年の本大会に向けて実際の競技内容や評価基準を確認する目的で、「過酷環境F-REIチャレンジ プレ大会」がRTFで開催された。
そしてWorld Robot Summit 2025である。大阪・関西万博の開催年でもあることからWorld Robot Summit 2025は万博会場を含む3会場での実施である。
まず7月には万博会場内EXPOメッセ「WASSE」で「未来のコンビニエンスストア」をテーマに、ロボットが店舗運営を支援する技術を競った。具体的には実店舗型の模擬環境で品出しや接客、清掃、セキュリティなど、人手不足を補いながら顧客満足を高めるロボットの導入を想定した競技が行われた。
12月には愛知県国際展示場で、ものづくり分野をテーマにした「モノづくりロボットチャレンジ」が行われた。多品種少量生産や変種変量生産に対応するスマート生産システムの構築を目指す競技で、自律的な工程変更や柔軟な搬送・組立、AIによる最適化とトラブル対応などが競われる。
もうひとつが本稿で紹介する10月10日から12日にかけて3日間にわたり開催されたインフラ・災害対応分野の「過酷環境F-REIチャレンジ」である。
地域復興と技術革新
過酷環境F-REIチャレンジがWRSの一分野とされた背景には、東日本大震災の教訓と、福島の復興を通じたロボット技術の社会実装という国家的課題が深く関わっている。
2011年の東日本大震災では、原発事故やインフラ崩壊といった「人が立ち入れない過酷環境」での対応が大きな課題となった。その教訓から、災害対応・インフラ点検・復旧支援におけるロボット技術の必要性が強く認識された。そこで福島は、RTFの整備やF-REIの設立を通じて、「過酷環境ロボット技術の国際拠点」としての役割を担うようになる。WRS開催は、地域の復興と技術革新を結びつける象徴的な取り組みと言えるだろう。
過酷環境F-REIチャレンジでは研究開発段階の技術ではなく、「実際の災害現場で本当に役立つ技術」を評価の中心に据えている。
競技はプラントやトンネル内で、ドローンや地上型ロボットによる日常の点検や災害時の対応、すなわち異常の確認から始まり、生存者の探索や把握、物資搬送まで、実際の災害現場を模したミッションで構成される。
地域貢献としては地元の企業や大学、研究機関との連携により、地域発の技術が世界と競う場を創出している。また国際的な災害対応技術の標準化や人材育成にも貢献することが期待されている。
レスキューロボットをゼロから立ち上げ
WRS2025過酷環境F-REIチャレンジにおいて災害対応カテゴリーの技術監修・競技設計を担当したのが田所諭(たどころ・さとし)さんだ。
田所さんは東北大学教授を経て現在、東北大学タフ・サイバーフィジカルAIセンター特任教授であり、世界におけるレスキューロボット研究開発の第一人者である。ちなみに東北大学タフ・サイバーフィジカルAI研究センターは田所さんたちが立ち上げた研究センターで、田所さんは初代そして前センター長である。現研ジャーナルでは田所さんが「ロボットが災害現場で活躍する未来をつくる」と題して2本の記事を執筆されている。
ロボットが災害現場で活躍する未来をつくる①
ロボットが災害現場で活躍する未来をつくる②
詳しくはこちらをぜひ一読していただきたいのだが、この場でも田所さんの経歴と実績について手短に紹介しておきたい。

少年時代の田所さんは『鉄腕アトム』や『鉄人28号』などのロボットアニメが好きで、やがてロボット研究の道に進んだ。
1995年、そのとき神戸大学の助教授だった田所さんは阪神・淡路大震災で被災した。
「公務員宿舎の5階に住んでいましたが、第三次世界大戦が来たのかなと思いましたね、本当に」
多くの人びとが瓦礫の下に閉じ込められた。救助にあたる消防隊はなかなか到着せず、一般市民がボランティアで救出作業にあたるしかなかった。工学の道で当初は産業用ロボットの効率化を研究していた田所さんだったが、被災した経験からロボットで人命を救う必要性を痛感した。
「調べてみると、誰もやっていないわけです」
その当時、レスキューロボット(災害対応ロボット)という概念すら存在しなかった中で、震災を機に「人を助けるロボット」へと方向転換した。ゼロから研究を立ち上げたのだ。
ロボカップ世界大会は人型ロボットによるサッカー競技として、1996年に大阪開催のプレ大会から始まった世界最大のロボットコンテストである。その後、田所さんが構想提案者の一人となり、2001年のシアトル大会から実物大の模擬災害フィールドを使うレスキューロボット競技も始まった。「競技のメカニズムを活用することで、研究者が自主的に社会課題に取り組むようになる」という理念に基づき、緩やかな競争と協調の場として田所さんたちはロボカップレスキューリーグを設計した。日本はもちろん世界でも災害対応ロボットの市場が小さく、企業の投資が難しい中、競技形式による技術開発の奨励という新しい方法論を提示したのだ。
2002年には国際レスキューシステム研究機構(IRS)を設立し、世界的な研究ネットワークを構築する。
2011年の東日本大震災では福島第一原発事故に際し、高放射線下でも活動できるロボット「Quince(クインス)」で原発内での調査に成功した。

「あまり認識されていないのですが、東日本大震災はたくさんのロボットが使われた、あるいはトライされた歴史上初めての大規模災害なんですよ。原発以外にも海中の捜索とか復興のための調査など、ロボットを使った様々な取り組みが行われました」
2014~2018年には「ハイリスクでハイインパクト、挑戦的で実用化志向の研究」に特化した内閣府の研究開発プロジェクト「ImPACT(インパクト)」で「タフ・ロボティクス・チャレンジ」が採択され、田所さんは研究開発の企画・遂行から管理まで一手に担うプログラムマネージャーとして、極限環境下でも機能するロボット群の開発と社会実装をけん引した。
その成果のひとつが空飛ぶ消火ホースロボット「ドラゴンファイヤーファイター」である。実は田所さんは神戸大に勤務していたとき、神戸市の消防隊員にどのようなロボットがあればいいと思うのか、意見を聞いたことがあった。
「それから数週間がたち、テレビを見ていたら火災現場で建物の屋根が落ち、殉死された消防隊員がいるというニュースが報じられました。気になってよく見ると、その方の名前が出ていたんです。お葬式にも行きましたが、奥さんが小さな赤ん坊を抱えて泣いておられました。それを見て、人の代わりに危ないところに入っていくロボットがあれば、その方は亡くならずにすんだはずだと思ったのですね。(ドラゴンファイヤーファイターは、それがひとつのきっかけになっているのですか?)もちろんそうです」

このほかサイバー救助犬、瓦礫の間を縫うように進む能動スコープカメラ、不整地や瓦礫の上での作業を想定した脚ロボットや重機型の建設ロボットなどが次々と開発された。
こうした田所さんの体験と研究が色濃く反映されたのがWRS2025の過酷環境F-REIチャレンジなのである。
過酷環境F-REIチャレンジ
RTFで開かれたWRS2025過酷環境F-REIチャレンジには日本内外の大学や研究機関、企業などから39チームがエントリーした。しかし海外から申し込んだ一部のチームでは、通関手続きが想定より時間を要して競技開始までに機材が到着しなかったり、日本の電波法に適合しないドローンの使用許可が下りなかったりするなどのトラブルがあり、最終的に参加したのは34チームとなった。ちなみに参加した海外勢はインド2チーム、インドネシア、エクアドル、オーストリア、スイス、台湾、ポーランド各1チームの計8チームである。
競技は以下の4種目で実施された。
(1)過酷環境ドローンチャレンジ
通信途絶・悪天候などの厳しい条件下で、ドローンが安全かつ確実に任務を遂行できるかどうかを検証する。飛行の安定性、発見や位置特定、物資搬送の確実性、自律運用と人・システムの連携などが評価項目となる。
(2)プラント災害チャレンジ
工場やプラント施設での日常点検と災害対応を想定し、ロボットが情報収集・安全確認・障害物除去を行う。狭所移動能力や障害物処理、センサーによる異常検知などが評価項目となる。
(3)シミュレーション災害チャレンジ
災害現場を模した仮想環境で、ロボットの探索・判断・操作能力を評価する。仮想空間での被災者探索、地図生成・状況報告、自律性と遠隔操作の融合などが評価項目となる。
(4)標準性能評価ドローンチャレンジ
災害現場などの過酷環境下で、ドローンが安定して任務を遂行できるかを、標準化された方法で検証する。運動性能、探査性能、地図生成能力、自律性能などが評価項目となる。
プラント災害チャレンジ
上記の内、本稿では「プラント災害チャレンジ」に焦点を当てて紹介することにしたい。なぜかというとプラント災害は、石油化学や鉄鋼をはじめとする巨大プラント、それに原子力発電所などの実在施設を想定しており、万一の事故に対する備えが特に急がれている分野だからである。福島第一原子力発電所事故の経験を踏まえ、プラント災害対応技術の進展は地域再生と深く結びついている。
想定は事故だけでなく、異常検知や初期対応にも重点が置かれ、災害の未然防止という視点を盛り込んで、企業が災害対応ロボットを導入するきっかけにもなるよう考えられている。
田所さんは「工場で爆発が起きる原因の多くは人災なんですね。人間が爆発を引き起こしているのですよ。ですからロボットが作業をすれば、より安全に調査したり作業したりすることが可能となります」と語る。
一方、挑戦者側とっては狭所移動、障害物除去、センサーによる異常検知など複数の技術要素が絡み、それぞれのチームが得意とする機材を投入することができる。
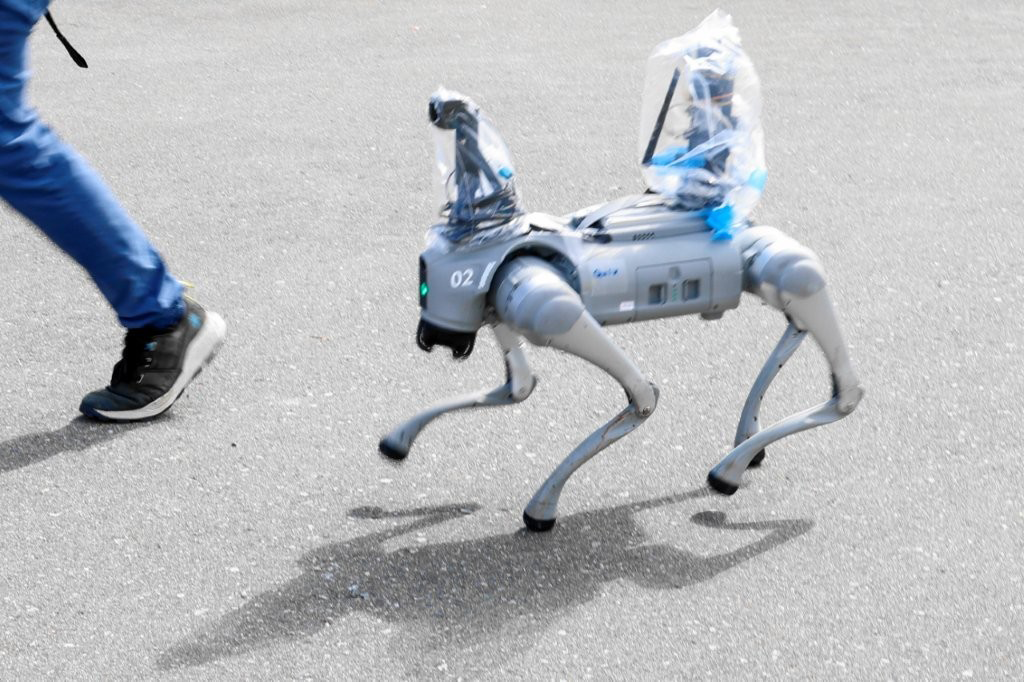
日本国内の電波法に準拠し、火災や爆発リスクのある機材は禁止などの規制はあるが、サイズは高さ120センチ以下、幅と奥行きが80センチ以下、重さ50キロ以下であれば、どのようなスタイルのロボットでも構わない。一般にはキャタピラーと呼ばれるクローラー(無限軌道)タイプを使うチームが多いが、今回の大会では犬型の四足歩行ロボットを導入したチームも多かった。もちろんドローンもOKだ。
出場チーム紹介
プラント災害チャレンジには海外3チームを含む10チームが参加した。国籍や所属を問わず、前述したように競技ごとに定められたロボットのサイズや安全基準、通信方式などを満たせば、誰でも応募可能だ。ただしチームメンバーは8人までとなっている。以下、主催者名簿順に紹介していきたい。
・ANAVAD(アナヴァド)…インドから参戦した。所属するアムリタ大学はインドで最高水準の評価を受けている私立大学である。
・明星大学レスキューチーム…明星大学理工学部(東京都)の学生チーム。本大会にはシミュレーション災害チャレンジ、標準性能評価ドローンチャレンジとあわせ3部門で出場している。
・MISORA+UoA…MISORA(ミソラ)は南相馬ロボット産業協議会、UoAは会津大学のことで、地元のロボット関連企業と大学による地域連携型チームだ。2024年のプレ大会では2位の実績を持つ。
・NITRo(ナイトロ)…名古屋工業大学のチーム。WRSやロボカップなどの災害対応競技に積極的に参加している。
・NuTech-R(ニューテックアール)…長岡技術科学大学(新潟県)の大学院生を中心に構成されたチーム。地元企業との合同チーム時代からのノウハウを受け継ぎ、学生主体でロボットの開発を行う。
・Quix(クイックス)…東北大学の大学院生が中心のチーム。2024年のプレ大会、それにロボカップジャパンオープン2024レスキュー実機リーグで優勝している有力チームだ。
・Robotic Systems Lab(ロボティックシステムズラボ)…スイス連邦工科大学チューリッヒ校に所属するチーム。今回は大型の四足歩行ロボットでの参加である。チーム名は違うが同じ大学所属のチームCERBERUS(ケルベロス)は、アメリカ国防高等研究計画局(DARPA=ダーパ)が主催した地下空間での自律探索技術を競う国際大会で優勝するなど、世界で最も進んだ技術と実績を持つ大学のチームだ。
・SAZANKA(サザンカ)…名古屋工業大学のチーム。チーム名は「困難に打ち勝つ」や「ひたむき」という花言葉を持つサザンカに因んでいる。
・SHINOBI(シノビ)…大阪工業大学と京都大学の合同チーム。チーム名は静かに、確実に任務を遂行する「忍び」に因んでいる。ロボカップジャパンオープン2024レスキュー実機リーグで準優勝している。
・Team DYNAMICS(チームダイナミックス)…オーストリアのグラーツ工科大学を拠点とするチーム。チーム名は動力学(Dynamics)と機動性(Mobility)を象徴し、災害現場での柔軟かつ迅速な対応力を表現している。
以上の10チームが出場し、初日から2日間にわたる予選が始まった。

ミッション
プラント災害チャレンジ予選では、デジタルツインからの指令に基づき、ロボットがプラント内の点検や異常検知、緊急対応を行う複数のタスクが課された。競技会場は地上6階建て、高さ約20メートルの試験用プラントである。内部には模擬タンクや模擬煙突、配管、バルブ、直線やらせん状の階段、狭所、高所など、災害現場を模した設備となっている。この試験用プラント内で時間と場所を別々に指定された各チームがそれぞれ以下のミッションに取り組み、合計点を競った。

・ミッションP1…デジタルツインから提示される作業指示に従い点検を行いう。圧力計などのメーターの数値を自動的に読み取り、デジタルツインに報告する。指示された状態になるようバルブの開閉を行う。
今回のミッションにおけるデジタルツインとは、ロボットが活動する模擬プラント環境を仮想空間上に再現した“もうひとつの現場”であり、競技の司令塔・評価装置・情報共有基盤として機能する。
具体的に説明すると、パソコン画面上に実際の競技フィールドと同じ構造・設備・配置を持つ3D仮想空間が構築され、そこにロボットの位置、センサー情報、操作結果などがリアルタイムで反映される。点検や操作、緊急対応などの各ミッションは、デジタルツインからロボット操縦者に「バルブAを閉めてください」「メーターBの値を報告してください」などの指令として提示される。このとき、ロボット操縦者は競技フィールの外部に設けられた遠隔操作室(オペレーションブース)で対応する。つまり危険なプラント現場には入らず、安全な場所から操縦するという想定なのだ。
ロボットが行った読み取りや操作、移動などは、デジタルツインに報告され、記録し評価される。
・ミッションP2…プラント設備の点検中、異常を検知し、迅速に報告する。その後、デジタルツインからの指示に従って速やかに対応し、事故を未然に防ぐ。
・ミッションP3…大型タンク壁面で、老朽化や経年劣化を要因とするクラック(亀裂やひび割れ)などを発見する異常診断だ。指定された箇所の検査結果をデジタルツインに報告する。
・ミッションP4…ボイラーの爆発事故が発生したとの想定で、事故対応のためデジタルツインからの指令により、被災状況を調査し、散乱した瓦礫を指示された場所へ撤去する。ガス漏れの危険性があるため、デジタルツインから指示されたバルブの閉栓を行い、作業内容をデジタルツインに報告する。
・ミッションP5…トンネル内で多重事故が発生したとの想定で、点検ロボットが出動する。トンネル内の事故車両内部を探査するとともに、要救助者の人数確認と場所の報告を行う。
・ミッションP6…デジタルツインから提示される点検作業指示に従って調査・点検を行っている最中に、稼働状態の異常もしくは事故が発生したとの想定だ。事故発生後のプラント内被災状況を迅速に収集してデジタルツインに報告するとともに、デジタルツインから指示された作業を行い、緊急対応を実施する。

ロボットの構成
それでは使われたロボットを紹介しよう。競技ではロボットの台数に関する規定はないが、特異な状況として操縦者の制限がないトンネル災害対応のミッションP5を除くと、操縦者は2人までと限られている。そこで地上ロボットが1~2台、ドローンが1台という構成のチームが多かった。
その地上ロボットだが、1台は前述したように無限軌道を備えたクローラータイプがほとんどとなっている。クローラーは接地面積が広く、瓦礫や泥など不安定な地盤でも安定した走行ができる。しかも段差や傾斜につよく、階段や瓦礫を乗り越える力が強い。左右のクローラーを逆回転させることで、その場での回転も可能となる。今回使われたクローラーロボットの多くが一般的なクローラー車両と異なるのは、メインのクローラーの前後にも2つずつ、あわせて4つの小型サブクローラーを備えていて、車体の両端を起点に前後のサブクローラーが上下に動くようになっていることだ。こうすることで、よりきびしい傾斜や高い段差、大きな瓦礫などの走破性を高めているのだ。
そして本体にはバルブ操作や瓦礫の除去が可能な多関節アームが取り付けられている。その先端にはメーターを読み取ったり、現場の状況を操縦者に伝えたりするためのカメラが取り付けられている。
大半は無線で操縦するタイプだが、ケーブルをつなぐ有線タイプを使うチームもある。
主力となるクローラータイプだが、チームによってサイズや装備にいろいろな工夫が盛り込まれている。機体のサイズは大きいほど踏破性は高くなり、逆に小さいほど小回りが利く。具体的に言えばクローラーの幅が広いほど安定性が高く転倒しにくくなる。逆に狭ければ旋回性能が高まり、機動性に優れるのだ。しかし機体が大きければ狭所を通れず、反対に小さければ大きな瓦礫を乗り越えられないというデメリットにもつながる。
東北大Quixチームリーダーの軍司健太さん、それに2021年の大会と2024年のプレ大会で優勝したときのチームリーダーで今回は通信管理が担当の小島匠太郎さんに話を聞いてみた。

小島さんはクローラーロボットの性能改善を研究テーマのひとつにしている。
「プランド点検ロボットは狭い壁に接触して動けなくなってしまうことがあります。そこで多少は壁に当たりながらも自律走行できるよう研究を重ねています」
これまでの研究成果は、大手重工メーカーで発売されているロボットの機能のひとつとして採用されたということだ。小島さんは、WRSでのロボット開発が実際に現場で活用されていると説明してくれた。
「WRSの競技に特化した作り込みをするという趣旨ではなく、ここで作ったものは例えばプラント点検の現場でも使えます。実際に長崎市の依頼を受けて、炭鉱があった軍艦島で内部調査を行った実績もあります」

軍司さんはロボットが能動的に空間認識できる技術を研究している。
「東北大のチームは長年培ってきた技術の積み重ねがあり、貴重な経験ができる機会だと考えて参加しました。実際に活用できたら世の中が変わるというロボットを作っています」
軍司さんは、これまでなかった最新技術も積極的に導入している。
「ロボットを操縦しているとき、どうしても人間の目ではわからない異変や異常があるんですね。あるいは無理な負荷がかかっているのに、それに気づかず動いてしまうこともあります。そうした課題にも対処できるよう、生成AIでロボットと対話しながら操縦する技術を構築しているところです」
前回、Quixのロボット構成はクローラーロボットとドローンに加え、メカナムホイールタイプの3台だった。メカナムホイールは車輪の円周に斜め45度で配置されたローラーが回転することで、前後、左右、斜め、回転といった全方向の回転が可能なロボットだ。平坦地では確かに移動性能は高いのだが、段差や傾斜地では転倒するリスクがある。
そのメカナムホイールタイプに変えてQuixが今回導入したのが、小型の四足歩行ロボットだ。外観や動作が犬に似ていて不整地や段差に強く、瓦礫も乗り越えやすい。しかし制御が複雑で、熟練した操縦が求められるといったデメリットもある。
予選
大会初日は曇りでときおり青空ものぞく穏やかな天気に恵まれ、一般の見学者も多く訪れた。こうした中、多くの声援を送られていたのが地元のMISORA+UoAチームだ。抽選の結果、初日はバルブのメーターの読み取りと日常点検のミッションが割り当てられた。競技終了後、メンバーは応援してくれた人たちに一日目の成果を報告した。
「最初はドローンの通信にトラブルがあり、5分ほどロスしましたが、落ち着いて無事に解決できました。デジタルツインから指示されて上の階から順に見に行きましたが、現実に問題が起きているのか、わざと誤認識させようとしているのか、カメラ映像を見て自分たちで判断していきました。クラックもほぼ見つけることができました。対応が必要な問題個所がわかると、地上ロボットがその場所まで自律移動することもできました。課題の3カ所とも自律移動で対応できたので、その分の加点が得られるかもしれません」
“自律”とは、ロボットが外部から指示されることなく、自分で判断して行動することだ。自律移動ではまず自己位置を推定し、周囲の環境を認識する。その上で、自分で移動経路を計画し、障害物を回避しながら目的地まで向かう。人間が現場に近づけない災害対応では重要な技術となり、WRSでは高いポイントが与えられる。
「現場で操作が必要なタスクについては、距離感がわからないので、隣に配置したドローンの映像を見ながらクリアすることができました」
プラント災害における肉厚検査は、内部圧力の膨張による爆発事故を防ぐために重要な非破壊検査だ。厚みが減少すれば危険な兆候である。カメラ映像では判断できない金属の厚さを超音波センサーで測定する困難な課題も、無事に対応できた。
「結果が正しいかどうかはまだわからないのですが、読み取ることはできました」
そう答えてくれたのはチーム代表の大西威一郎さんだ。
「きょうは思った通りの試合ができました。デジタルツインへの対応もうまくできました。世界の強豪チームが参加していますが、私たちはこの場所で何十回と練習を重ねてきました。必ずしも天才が勝つわけではなく、凡才でも緻密な戦略をたてればいい勝負ができると思います。私たちは南相馬の人たちの思いを背負って、自分たちが今までやってきたことを信じながら粛々と取り組むだけです」
大西さんはインドチームから「ありがとう」と感謝の言葉をかけられた。
「部品がなくなって困っていたので、一緒に探してあげたんですよ」
参加した各チームのメンバーはお互いに情報交換したり、助け合ったりしている。ライバルであると同時に、志を同じくする仲間なのだ。

初日の競技が終わって、Quixの小島さんにも話を聞くことができた。
「P4のミッションではバッテリーが外れてしまったため、リセットをかけて再スタートするというミスがありました。その後、すべてのエリアの写真を撮って確認したあと、デジタルツインからの指示どおりにバルブを回すことができました。その次に瓦礫の除去を指示されたのですが、その途中で時間切れになったという状況です。ほかにもミスしたところはあったのですが、取れるところで得点はきちんと取れたという印象です」
昨年のプレ大会との比較も聞いてみた。
「P4とP6では災害環境で通信が制限される状況が入り、通信量を圧縮する工夫をしないと遅延して映像が遅くなったり、見にくくなったりして、ぼくらを含めていろんなチームが苦戦していました」
大型の四足歩行ロボットで挑戦したスイス工科大のチームは有力候補と目されていたが、機体の大きさに対して現場の通路がかなり狭く、移動するだけで精一杯という局面も見られた。

大会二日目は、前日から一転して雨が降り、強い風も吹きつけるあいにくの天気となった。私は着替え用に持ってきた服を重ね着してようやく寒さをしのげるというほどの悪天候だった。会場の試験用プラント内で直接、ロボットが雨にうたれることはないが、多少濡れるのは避けられず、防水機能がないロボットは不利となる。壁がないため強い風が入り、小型のドローンなど影響を受けたロボットも多かった。
瓦礫に見立てたパイプがすべって乗り越えられず、苦戦するチームも相次いだ。
2日間の予選を終えて決勝に駒を進めたのは4チーム。得点順に1位がNuTech-R(長岡技術科学大)、2位Quix(東北大)、3位に地元のMISORA+UoAと続いた。4位にはRobotic Systems Lab(スイス)が滑り込んだ。

決勝戦と成績発表
三日目の決勝戦では予測不能な状況に対する柔軟な対応力や技術運用の実力が問われた。具体的には競技中、「事故が起きた」との指令が入り、状況が変化する。これを受けて事故に関連するバルブの状態を再確認し、必要に応じて閉栓する。さらに爆発や崩落を想定した瓦礫を安全に撤去する。そして現場の変化をデジタルツインに報告し、次の指令を受けるのだ。
評価のポイントは状況変化への対応力、つまり事故発生後の判断と行動の速さが問われた。それだけでなく通信制限下での安定操作や安全距離の遵守、複数ロボットの連携と役割分担も評価された。
すべての競技を終えた最終日の午後4時、RTFのメインステージで表彰式が行われ、各競技の最終成績が発表された。
このうちプラント災害チャレンジは第三位が地元のMISORA+UoA、第二位は東北大のQuix、そして優勝の栄冠を勝ち取ったのは長岡科学技術大学のNuTech-Rだった。

NuTech-Rが発足したきっかけは2004年の新潟県中越地震だ。長岡科学技術大学と地元企業で構成される『ながおか次世代ロボット産業化機構 Nexis-R』が連携してレスキューロボットの開発を始めたのだ。近年は国内のロボット大会で3位入賞を複数回達成していて、更なる高みをめざしながらロボットの改良を続けてきた。チームリーダーを務めた長谷川晴基さんが優勝の喜びを語ってくれた。
「特にトンネル内の競技では、ほかのチームが真っ暗な中で作業していたのに対し、ぼくらのチームはメカナムホイールで機動性のあるロボットに強力なライトを付けて、作業を担当するクローラーロボットに並走させたのが良かったと思います。
うちのロボットの強みは、大会で勝つためではなく、レスキューという目的を常に意識しているということです。今回のロボットは今年1月から作り始めましたが、雨や風に強いハードな作りをしています。大会二日目はものすごく雨が降って、ほとんどのチームが全然競技できないという感じでしたが、うちのチームに関しては簡易的な防水対策をするだけで、いつもどおりに競技することができました。悪天候に左右されず、100%のパフォーマンスを発揮できたのが勝因と思います」

NuTech-Rの競技を中継映像で見ていて、ドローンが地上に落ち、上下を逆にしてひっくり返ってしまった場面があった。ふつうならそこでギブアップして再スタートを選択する場面だが、操縦者は機体を巧みに操り、再び離陸して飛行することに成功した。
「ドローンの操縦が好きなメンバーがいて、練習というより遊んでいて、その延長線上で操縦がすごく上手になったようです」
好きこそものの上手なれということだ。改めて優勝の感想を聞いてみた。
「スイスやオーストリアの強豪チームも出場する中、ぼくらが優勝できるとは正直、思っていませんでした。ただ、ぼくらは日々の練習と、様々なシチュエーションを想定した戦略を練っていたので、それがいい結果につながったと思います。ずっとブロンズコレクターと言われてきましたので、とてもうれしいです。これまで支援していただいたながおか次世代ロボット産業化機構の皆様に感謝したいです」
総括
表彰式では千葉大学名誉教授で「過酷環境ドローンチャレンジ」の競技委員長を務めた野波健蔵さんが、担当競技を総括した。
「当初は9チームがエントリーしていましたが、最終的に参加したのは5チームにとどまり、海外の4チームは参加できませんでした。なぜかと申しますと、2チームは日本の電波法や航空法の規則にあわず、さらに2チームはメンバーのビザが下りなかったなどの問題があり、結果的に辞退されました。海外チームがアウェイで競技することの難しさを、身をもって感じました」
ドローンに対する規制が世界的に強まっていることも背景にある。
続いて、残る3種目の競技委員長を務めた田所さんが大会の成果を総括した。
「プレ大会と比べるとはるかにレベルの高いロボットの動きや機能を見ることができました。非常に素晴らしい成果だと思います。
過酷な環境でロボットが動けるか、機能を果たせるか、そして社会に貢献できるかが、このチャレンジの課題です。従いましてこの3つのチャレンジでは、本当に過酷な環境を作り込みました。福島原発事故をモチーフとした競技も行いました。そこでは真っ暗で何も見えない。あるいは煙が充満している。炎が出ている。高い場所で作業しないといけない。放射線の影響でカメラの映像にノイズが出る。複雑な障害物がある。そういった非常に困難な環境の中を移動しながら、最終的には格納容器の中に入らないといけない。そして中を確認するという困難なチャレンジであったわけです。これに対して、非常に優れた成果をあげるチームも出てきました。
汚染現場では付着物を拭き取って確認する作業が非常に重要になります。そこでドローンの競技では、非常に狭い空間の中でサンプルリターン、つまり物を取って帰ってくる作業を見せてもらいました。各チームは様々な工夫をこらし、従来以上の性能を示していただけたのは大変素晴らしかったと思います。
また今回のチャレンジでは、デジタルツインに対する報告が義務付けられました。こうして情報が収集され、状況に応じて違ったミッションが与えられます。実際の現場ではそれができなければ、ロボットは使い物にならないわけです。日常点検で異常が見つかり、緊急事態になることもあります。行方不明者を発見しないといけなくなることもあります。ミッションが変化しながら目的を果たしていくという困難な課題に取り組んでもらいました。結果的に非常に素晴らしい成果が得られたと思います。
これからのロボットには電波が届かなくても、自分である程度の機能を発揮する自律性が求められてきます。災害救助の現場では特に重要になってきます。次回以降の大会では、そうした対応もこれまで以上に求められるようになると思います。
いずれにしましても非常に素晴らしい大会でした。WRSの目的は復興であり、イノベーションです。事業化し、商品を作り、社会実装するだけでなく、社会に対して本当に貢献することが求められています。それに向かって一歩ずつ歩んでいけたら大変素晴らしいと思います」

WRSは単なる競技会ではなく、ロボット技術の社会実装、地域復興、人材育成、そして国際連携を目的とした「共創の場」である。学生、研究者、技術者、企業が一堂に会し、実社会の課題解決に向けたロボットの可能性を競い合うことで、次世代に向けたイノベーションを育んでいく。競技に参加したすべての人たちから、「科学技術は困っている人を助けるためにある」という熱い思いが伝わってきた大会だった。

中村尚樹(なかむらひさき)氏
1960年、鳥取市生まれ。九州大学法学部卒。ジャーナリスト。現研客員研究員。法政大学社会学部非常勤講師。元NHK記者。
著書に『日本一わかりやすい宇宙ビジネス-ネクストフロンティアを切り拓く人びと』『最先端の研究者に聞く日本一わかりやすい2050の未来技術』『最前線で働く人に聞く日本一わかりやすい5G』『ストーリーで理解する日本一わかりやすいMaaS&CASE』(いずれもプレジデント社)、『マツダの魂-不屈の男 松田恒次』『最重度の障害児たちが語りはじめるとき』『認知症を生きるということ-治療とケアの最前線-』『脳障害を生きる人びと-脳治療の最前線』(いずれも草思社)、『占領は終わっていない-核・基地・冤罪 そして人間』(緑風出版)、『被爆者が語り始めるまで-ヒロシマ・ナガサキの絆』『奇跡の人びと-脳障害を乗り越えて』(共に新潮文庫)、『「被爆二世」を生きる』(中公新書ラクレ)など。
共著に『スペイン市民戦争とアジア-遥かなる自由と理想のために』(九州大学出版会)、『スペイン内戦とガルシア・ロルカ』(南雲堂フェニックス)『スペイン内戦(一九三六~三九)と現在』(ぱる出版)など。